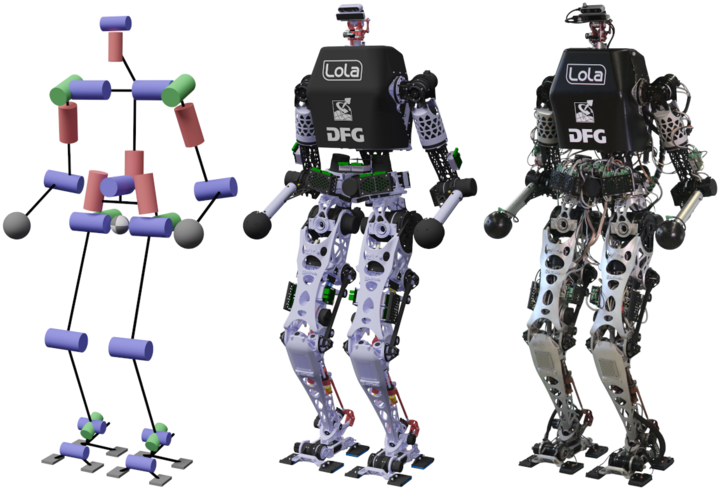
Im Rahmen des DFG Projektes "Adaptives Laufen durch Multi-Kontakt Stabilisierung und Nutzung von Teilkontakten für humanoide Roboter" (Projekt Nummer 407378162) wurde der Forschungsprototyp LOLA umgebaut. Hierzu wurde der komplette Oberkörper des Roboters - bestehend aus Torso und Armen - neu entwickelt, analysiert und schlussendlich umgesetzt. Durch den Umbau wurde der erreichbare Arbeitsraum der Hände wesentlich erweitert, wodurch ein Abstützen an Wänden seitlich möglich wird. Besonderes Augenmerk wurde auf eine erhöhte Belastbarkeit des Oberkörpers gelegt, um den Roboter auf die gestiegenen Kontaktkräfte vorzubereiten. Die Umbauarbeiten wurden vor Kurzem abgeschlossen. In einem Video zeigen wir die wesentlichen Änderungen und eine erste Analyse. Für weitere Informationen zu unserem humanoiden Roboter LOLA siehe <https://www.mw.tum.de/am/forschung/aktuelle-projekte/robotik/humanoider-roboter-lola/>.