Real-Time Hybrid Substructuring
Einleitung
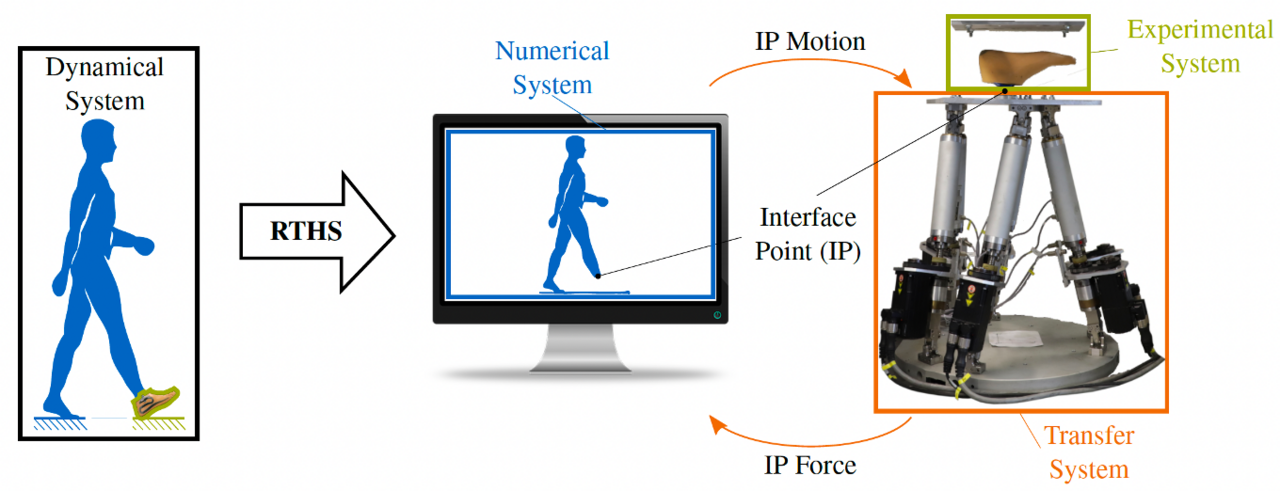
Ein Forschungsthema, das alle unsere Kompetenzen – Numerik, Robotik und Experimentelle Dynamik - vereint, ist die Arbeit mit Real-Time Hybrid Substructuring (RTHS). Diese Methode, auch häufig Hardware-in-the-Loop (HiL) auf mechanischer Ebene genannt, beschäftigt sich ebenso wie die anderen Substrukturierungsmethoden mit der Analyse von dynamischen Systemen. Bei RTHS (vgl. Abbildung) wird ein dynamisches System untersucht, indem ein Teil des dynamischen Systems experimentell am Prüfstand getestet wird und die restlichen Komponenten in einer numerischen Simulation simuliert werden. Die beiden Komponenten Simulation und Experiment werden in Echtzeit durch Austausch von Verschiebungs- und Kraftinformation miteinander gekoppelt. Die Teile des dynamischen Systems, von denen numerische Modelle verfügbar sind, werden in der numerischen Simulation berechnet, während die (kritischen) Teile, deren Dynamik weitestgehend unbekannt ist, am Prüfstand getestet werden. Der Aktor (im Bild ein Hexapod-Roboter) bringt die in der numerischen Simulation berechnete Verschiebung auf die experimentellen Komponenten auf. Ziel in RTHS ist es, die Kopplung zwischen der Simulation und dem experimentellen Teil möglichst gut durchzuführen, damit das Testergebnis das dynamische System fehlerfrei abbildet. Da die Kopplung in der Realität nie ideal abläuft, ist die Regelung von Aktoren ein großes Forschungsfeld im Bereich von RTHS.
Aktuelle Projekte
Eine zentrale Fragestellung in der Entwicklung von Fußprothesen ist, wie sich die Prothese auf das Gangbild des Menschen auswirkt. Dadurch möchte man beispielsweise klären, wie sich der Mensch an eine bestimmte Prothese anpasst und ob für kontinuierliches Gehen ein erhöhter Energieaufwand bzw. eine erhöhte Muskelspannung nötig ist, die sich negativ auf den Patienten auswirkt. Das Zusammenspiel von Mensch und Prothese betrachten wir deshalb als dynamisches System. Um den Menschen weitestgehend aus dem Testprozess herauszuhalten und dadurch eine objektive und sichere Testumgebung aufzubauen, beschäftigen wir uns mit dem Aufbau von RTHS Tests für Fußprothesen. Dabei wird der Mensch numerisch simuliert und die Prothese befindet sich auf dem Prüfstand. Für die numerische Simulation des Menschen greifen wir auf Menschmodelle zurück, die aus den Bewegungswissenschaften bekannt sind. Diese koppeln wir mittels RTHS mit der Prothese, die am Prüfstand montiert ist.
Beim Bewegungsablauf des Gangs kommt es beim Auftreten auf dem Boden zu Kontakt. Kontakt führt in vielen technischen Anwendungen zu Instabilität und unerwünschten dynamischen Vorgängen. Auch die bisherig in der Literatur bekannten Methoden für RTHS reichen nicht aus, um eine stabile Kopplung zu gewährleisten, wenn dynamische Systeme mit Kontakt untersucht werden. Deshalb beschäftigen wir uns im DFG-Projekt "Robuste Regelung und Genauigkeitsbewertung von Real-Time Hybrid Substructuring von Kontaktproblemen" (Projektnummer 450801414) mit der Methodenentwicklung, damit mittels RTHS zukünftig auch dynamische Systeme mit Kontakt stabil und sicher untersucht werden können. Konferenzbeiträge hierzu finden Sie auf unserem YouTube channel und Tutorials/Beispielcodes zu den entwickelten Methoden finden Sie zum öffentlichen Download hier.