- Dynamic modeling of robotic manipulators for accuracy evaluation. 2020 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2020 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)
- Experimental Analysis of Structural Vibration Problems of a Biped Walking Robot. 2020 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2020 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)
- An External Stabilization Unit for High-Precision Applications of Robot Manipulators. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2020 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)
- External Vibration Damping of a Robot Manipulator's TCP Using Acceleration Feedback. PAMM 19 (1), 2019 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)
- Modal Analysis of a 7 DoF Sweet Pepper Harvesting Robot. In: Topics in Modal Analysis & Testing, Volume 8. Springer International Publishing, 2019 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)
- Evaluation of an External Vibration Damping Approach for Robot Manipulators Using a Flexible Multi Body Simulation. 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), IEEE, 2019 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)
- The Influence of Structural Dynamics on Cascaded Joint Position Control of a Flexible Beam with a Compliant Gear. 2019 19th International Conference on Control, Automation and Systems (ICCAS), IEEE, 2019 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)
High Precision Robotics
External Stabilization of Robot Manipulators
Research Topics
- Multi physical simulation of robot manipulators, which combines models for the electrical system, joint controllers, gear / joint flexibilities and flexible links in one flexible multi body simulation environment.
- Experimental methods to identify models of the structural dynamics of robot manipulators.
- External approaches to improve a robot manipulators trajectory tracking precision.
- Design and test of actuator prototypes for this purpose.
Project Description
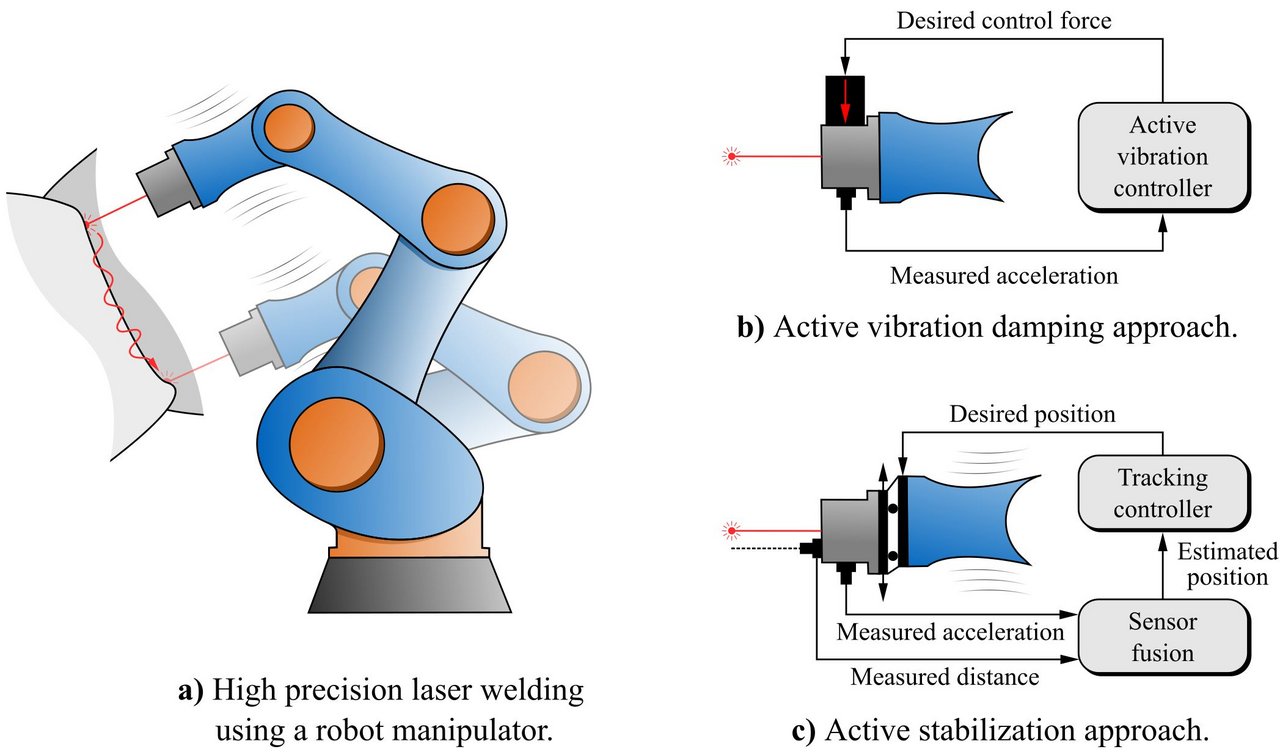
Due to their large workspace, robot manipulators have the potential to be used for high precision non-contact manufacturing processes, such as laser cutting or welding, on large complex work pieces (Fig. a). However, most industrial manipulators are not able to meet the necessary accuracy requirements. As a result of their flexible structures, they are subject to point to point positioning errors and also vibration errors on a smaller scale. The vibration issues are especially hard to deal with. Many published solutions propose modifying the robot's own control system to deal with these problems. However, most modern control techniques require high fidelity models of the underlying system dynamics, which are quite difficult to obtain for robot manipulators.
In this project, we investigate the possibility of using external approaches to improve a robot manipulator's trajectory tracking performance. The main idea being that we want to develop an additional mechatronic device that can be attached to an industrial robot manipulator, which improves its tracking accuracy. The device should work with as little information about the robot as possible and should thus be deployable for a wide variety of industrial robots.
We are looking into two main approaches to achieve this goal:
- The first one utilizes acceleration feedback at the robots mounting flange, using the inertial force of a voice coil actuator as the control variable (Fig. b). With this setup we can employ Active Vibration Damping techniques for collocated sensor/actuator pairs. The system damps the structural vibrations of the robot manipulator, improving its tracking accuracy.
- The second approach uses an additional set of actuators to move the process tool relative to the robot's mounting flange (Fig. c). This stabilization unit decouples the process tool from the robot and prevents the transfer of disturbances from the robot to the tool. In order for this to work, we need a good estimate of the current position of the tool relative to the process surface, which we achieve using multiple types of sensors and sensor fusion.
The main challenge for both approaches is the coupling between the stabilization device and the robots own structural dynamics. In order to design suitable controllers, we developed a flexible multi body simulation of a generic robot manipulator using measured data of our own CROPS harvesting robot and a UR10 robot. The simulation also employs models for the electrical system of the robot, the joint controllers and the flexibilities in the gears and joints of the robot.
Recently, we were able to design a stabilization unit prototype, which was able to reduce the trajectory tracking error of an UR 10 robot from 1 mm to 10 micrometers.
Contact

M.Sc. Tomas Slimak
- Tel.: +49 (89) 289 - 15226
- Raum: 5501.03.104
- tomas.slimak@tum.de
Acknowledgements
This project is partially supported by Boeing Research Technology - Europe, Brabanterstr. 4, 80805 Munich, Germany.