Dual-Arm Manipulation
The project "Adaptive Prozessplanung mittels mobiler Vormontage-Systeme", funded by Kompetenzzentrum Mittelstand GmbH (https://kme-mittelstand.de/), aims to develop a mobile dual-arm robot system for intralogistics. The goal of the project is to expand the range of tasks performed by automated guided vehicles (AGVs) to include complex handling and pre-assembly processes. In order to increase efficiency of real-life logistics applications, the handling and assembly tasks are executed during the motion of the mobile platform.
The project partners are the Chair of Applied Mechanics (am) and the Chair of Materials Handling, Material Flow, Logistics (fml) of the Technical University of Munich and the project duration is two years.
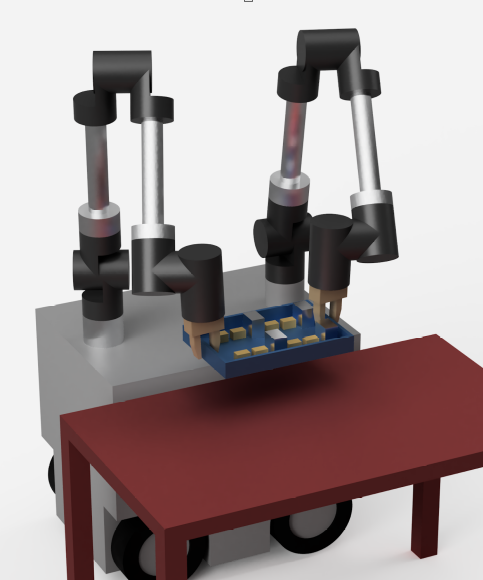
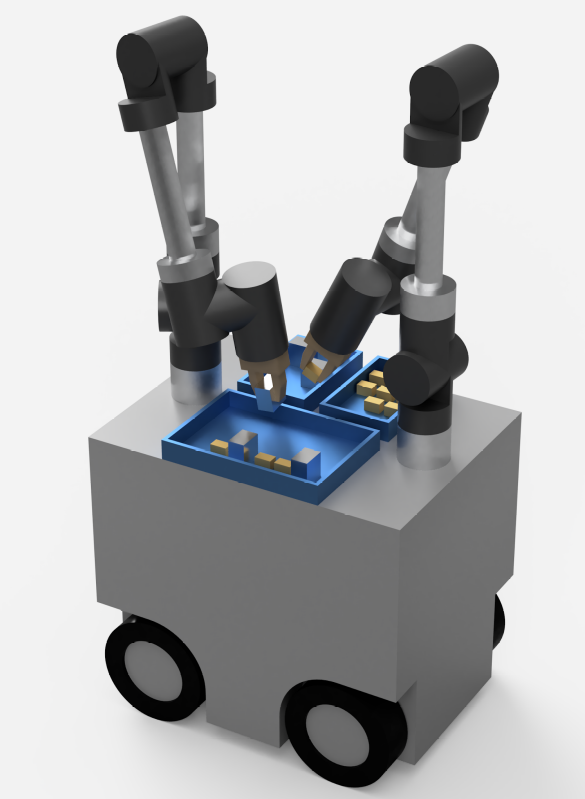
fml develops the high-level task planner and the navigation module for the mobile platform. We at am, develop the manipulation planning for the dual-arm system. Literature distinguishes coordinative and cooperative dual-arm manipulation. The former are applications in which both arms handle different objects but place them in the same box. The latter are applications in which both arms manipulate the same objects, e.g. picking up a big box. Research topics include ...
- Planning Strategies for Coordinated Dual-Arm Manipulation: How to avoid collisions not only between robot arms and object but also between both robot arms? We favor single query planning strategies that provide efficient planning in changing environments.
- Planning Strategies for Cooperative Dual-Arm Manipulation: How to deal with the kinematic chain of both robot arms handling one object? How to constrain the object motion to keep it upright?
- Control Strategies for Cooperative Dual-Arm Manipulation: How to limit internal forces of the object? How to exploits the system's redundancy?
Acknowledgement

This project is supported by the Kompetenzzentrum Mittelstand GmbH (KME).
Contact
Jonas Wittmann, M.Sc.
Student Projects
If you are interested in writing a student thesis (BA/SA/IDP/MA) on a topic related to this research topic or you want to contribute as a student assistant (HiWi), please contact Jonas Wittmann.