EPoSysKo
Development and Potential Analysis of a System Coordinator for the Cross-type Operation of Industrial Trucks
Automated Guided Vehicle Systems (AGVSs) are a flexible way to automate the internal flow of materials. The constantly increasing number of variants of Automated Guided Vehicles (AGVs) is leading to an increasing number of material flow systems using different types of AGVs in parallel.
Especially in the case of small and medium-sized enterprises (SMEs), it is not always possible to use tailor-made overall solutions with uniform control software. Instead, AGVs are purchased from various manufacturers, with each manufacturer providing a specific control system for its vehicles. An exchange of information between these control systems is usually not possible, which is why a large potential for process optimization remains unexploited.
In this project, a coordinative control system is being developed which enables the exchange of information between several AGVSs for the purpose of increasing efficiency. In contrast to a centralized or decentralized control architecture, the know-how of the AGV manufacturers implemented in the control systems is thus respected.
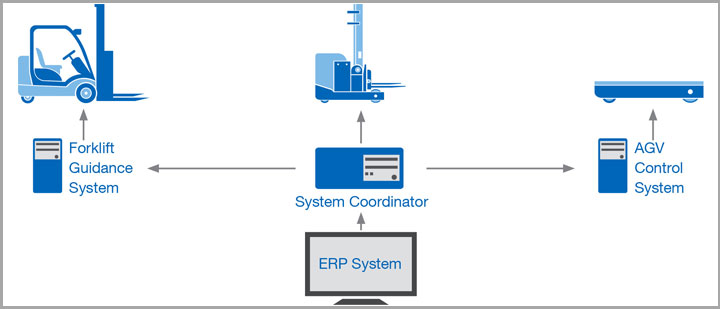
In addition to the integration of various AGV control systems, the system coordinator should also allow the integration of individual vehicles without a control system as well as guidance systems for manually operated industrial trucks. Figure 1 (see above) shows the system coordinator with the interfaces to different vehicles and to the ERP system, which generates transport orders.
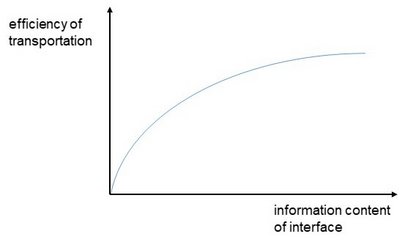
The more information from the control systems is made available to the system coordinator, the more efficient it can process transportation (see Figure 2). We assume that the efficiency of transportation stagnates as the interface becomes increasingly larger. Therefore, the focus of this research project is to investigate the effects of interface design and the choice of optimization methods on the transport efficiency of the overall system.
Work packages 1 and 2: In order to achieve the above-mentioned goals, first an investigation of the interfaces of existing AGV control systems is carried out. Based on this research, a classification is created according to which such interfaces can be grouped. Subsequently, the state of the art of optimization approaches for transport processes will be determined. A special focus lies on the information required by the algorithms as input variables.
Work package 3: A system coordinator is developed and formally described. It uses the available information to influence the connected systems in order to optimize the in-company transport processes.
Work package 4: A simulation environment is now being set up in which the newly developed system coordinator can be tested with various optimization strategies. For comparison of the performance, also some conventional control systems need to be modelled.
Work packages 5 and 6: With the help of the simulation, the optimization potential of various interface configurations is determined. Based on this, recommendations for manufacturers and users of AGVSs are then formulated.
- Brose Fahrzeugteile GmbH & Co. KG
- E&K Automation GmbH
- Jungheinrich Degernpoint AG & Co. KG
- Kuka Deutschland GmbH
- ME Industries GmbH
- Schiller Automatisierungstechnik GmbH
This research project is carried out under the number 20918 N on behalf of the Forschungsgemeinschaft Bundesvereinigung Logistik e.V. (German Logistics Research Association) (BVL) and is funded by the Federal Ministry of Economic Affairs and Climate Action through the German Federation of Industrial Research Associations "Otto von Guericke" e.V. (AiF).