Der Standort München - die Partner
Am Standort München werden im Projekt OR.Net die Institute
durch das BMBF gefördert.
Projektübersicht - Inhalte

Ausstattung konventioneller Operationssääle
Im Zentrum dieses Projekts steht die Kommuni-kation aktiver chirurgischer Geräte (Fräse, Sauger, HF-Gerät, US-Dissektor,...) und Sensorsysteme (Navigation, Neuromonitoring,..) für chirurgische Eingriffe. Diese Geräte kommen bei chirurgischen Eingriffen nahezu aller Fachrichtungen (>15 Mio./Jahr in Deutschland) zum Einsatz.
Stand der Technik

Allein in Deutschland gibt es mehr als 1000 Unternehmen kleiner und mittlerer Größe (KMU) im Bereich der Medizintechnik. Hersteller medizinscher Geräte verwenden meist hauseigene Geräte-schnittstellen. Geräte werden meist in kleinen Geräteverbünden (z.B. Fußpedal, Fräse) vertrieben - mit Ausnahme sogenannter integrierter Operationssääle (z.B. Karl Storz OR1®), in denen alle Geräte über ein herstellereigenes Bussystem kommunizieren.
Kritik am Stand der Technik
Proprietäre Schnittstellen (Hardware/Software) erlauben keine Verschaltung von Geräten unterschiedlicher Hersteller. Herstellereigene Bussysteme verhindern die Marktteilnahme der KMU. Auch die Teilnahme an offenen Schnittstellen/Protokollen erfordert Informatik-Personal, welches KMU oft nicht finanzieren können. Der Betreiber haftet selbst für die herstellerübergreifende Vernetzung von Geräten. Schon einfachste Funktionen verschalteter Geräte erfordern eine neue Zulassung (z.B. Videoquelle->Monitor).
Aufgabenstellung
Ziel des Projekts ist die Erarbeitung von Strategien für die hersteller-unabhängige, echtzeitfähige und dynamische Vernetzung von Medizingeräten des Operationssaals. Es sollen Konnektoren zur Anbindung bestehender Geräte an das Netzwerk realisiert werden, ohne diese zu verändern (Software, Hardware). Zudem sollen Methoden für die konsistente Zulassungsdokumentation sowie die Risikoanalyse dynamisch veränderlicher Netzwerke von Medizingeräten implementiert werden.
Erwartete Vorteile
Kleinen Unternehmen wird ohne Veränderung der eigenen Geräte die Marktteilnahme ermöglicht. Für Betreiber und Anwender ergibt sich so ein größeres Funktionsspektrum und die Problematik der Eigenherstellung wird umgangen.
Struktur Echtzeitvernetzung
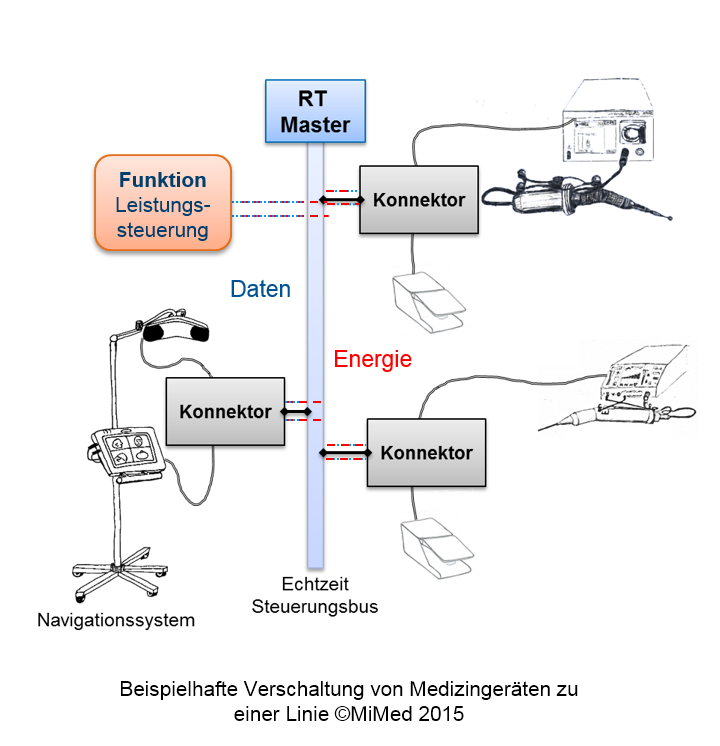
Die Echtzeit-Infrastruktur nutzt das Ethernet Powerlink Kommunikationsprotokoll. Konnektoren, die einfach in Linie verschalten werden, binden Medizingeräte an die Infrastruktur an. Sie besitzen eine maschinenlesbare Spezifikation des Medizingeräts. Der Master erkennt angebundene Konnektoren und synchronisiert sie. Er implementiert eine vorab definierte Verschaltung und versorgt die Konnektoren mit Strom.
Struktur der Risikoanalyse veränderlicher Netzwerke

Ein Betreibertool visualisiert Geräte anhand ihrer Beschreibungsdatei. Der Anwender kann sie virtuell verschalten. Daraufhin findet eine digital unterstützte Risikoanalyse statt, welche die Kompatibilität von Datenbereichen, die Einhaltung von Echtzeitkriterien und vereinzelt Anforderungen der 93/42 EWG prüft. Nach der Freigabe durch das Tool kann die Verschaltung auf den Master geladen werden.
Struktur der Zulassungsdokumentation
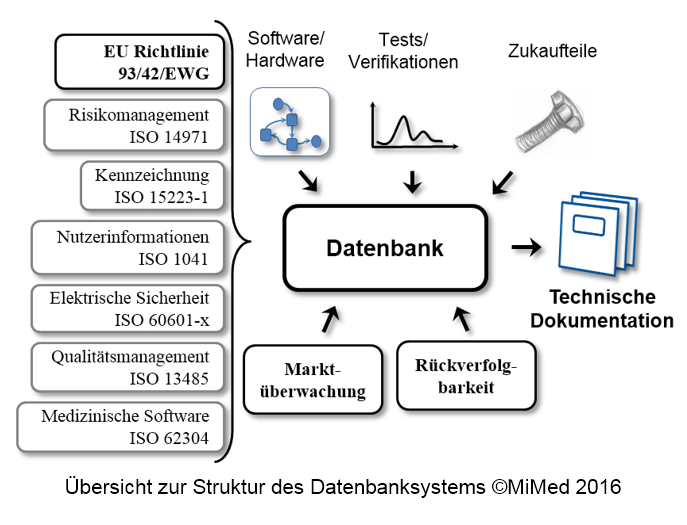
Ein relationales Datenbanksystem ermöglicht die konsistente Erstellung der technischen Dokumentation. Der Fülle an Abhängigkeiten (z.B. Risikoanalyse, Gebrauchsanweisung) - wird durch relationale Verknüpfungen begegnet.
Beschreibung der Lösungsprozesse
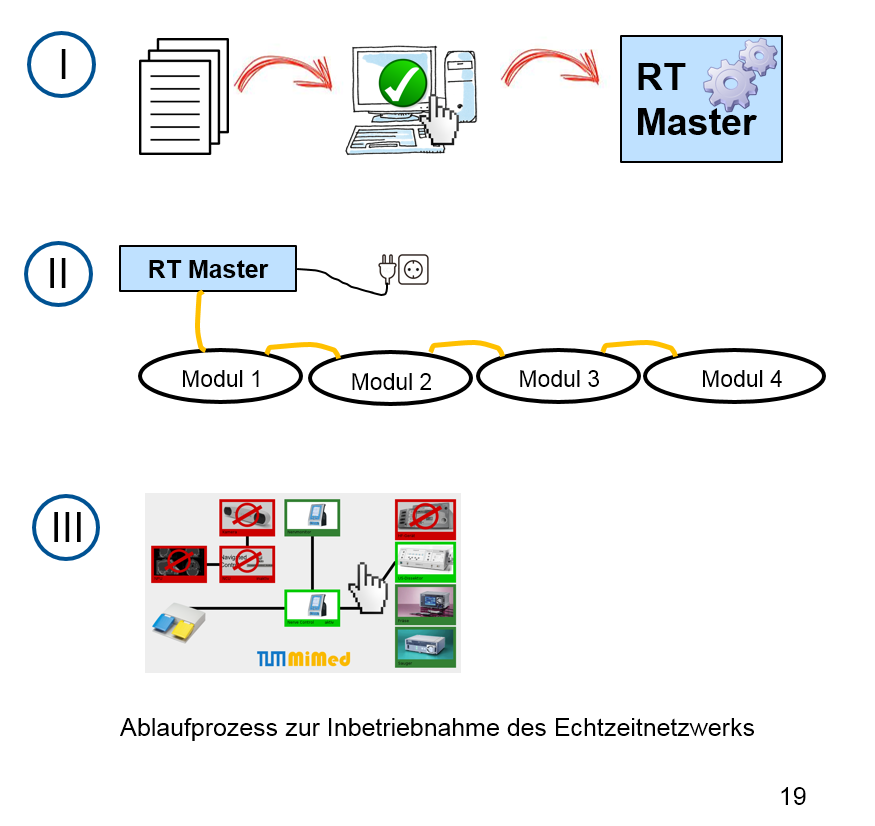
Zunächst werden die Beschreibungsdateien auf das Betreibertool geladen und auf diesem virtuell verschalten. Bei erteilter Freigabe wird die Verschaltung auf den Master geladen. Nun können die Module in Linie (Reihenfolge egal) an den Master angebunden werden. Sobald der Master angeschalten ist, erkennt er angebundene Geräte und zeigt deren Verschaltung an. Das Netzwerk ist nun betriebsbereit. Die Verschaltung kann per Touch dynamisch verändert werden.
Wissenschaftlicher Anspruch
Das beschriebene, im Februar 2016 realisierte System ist das weltweit erste, mit dem Medizingeräte dynamisch, echtzeitfähig und herstellerübergreifend miteinander kommunizieren können. Das Tool zur Risikoanalyse des Geräteverbunds ist das erste, das mit formalen Methoden automatisch die Sicherheit eines dynamisch veränderlichen Medizingeräteverbunds prüft.
Realisierung Konnektoren
Konnektoren sind auf Basis des Beaglebone Black Rev. C mit dem Echtzeit-Betriebssystem QNX 6.6 (ISO 62304-konforme Entwicklung) realisiert. Die erforderliche Elektronik, sowie die Gehäuse (PA 2200, selektives Lasersintern) wurden am Lehrstuhl MiMed entworfen und gefertigt.

Realisierung Master
Der Master wird über ein Touch-Display konfiguriert. Er zeigt verfügbare Geräte an und erlaubt die Änderung der Verschaltung. Funktionen können dynamisch per Klick auf das Symbol hinzugeschalten werden. Der Master hat 4 Ports für den Echtzeit-Bus (Daten und 24V DC Versorgung) sowie einen Port für die Änderung der Konfiguration über OSCP.

Realisierung Betreibertool
Das Betreibertool visualisiert Medizingeräte anhand ihrer Beschreibungsdatei als Stateflow Charts. Ein- und Ausgabedaten der Geräte können virtuell verschalten werden. Das Tool prüft die Verschaltung auf ihre Gültigkeit und gibt das Ergebnis an den Nutzer aus.

Realisierung Zulassungsdokumentation
Die Zulassungsdokumentation erfolgt mit einem relationalen Datenbanksystem unter FileMaker Pro 14 Advanced und FileMaker 14 Server. Es setzt Kapitel der technischen Dokumentation konsistent um und ist lauffähig unter Windows und Mac. Der Zugang ist auch möglich per iPad und Webbrowser.

Zusammenfassung
Im BMBF-Projekt OR.Net wurden
- geeignete Strategien für die dynamische, herstellerunabhängige, echtzeitfähige Vernetzung von Medizingeräten des Operationssaals
- neue Funktionen, die dynamisch in das Netzwerk eingekoppelt werden können
- Methoden für die konsistente Zulassungsdokumentation
- Methoden für die Risikoanalyse dynamisch veränderlicher Netzwerke von Medizingeräten
erarbeitet und exemplarisch implementiert.
Download-Material
Selected Publications:
Lüddemann, T.; Bebert, H.; Schiebl, J.; Lueth, T. C.;, "Dynamic generation of technical documentation for medical devices", Proceedings of the International Conference onRobotics and Biomimetics (ROBIO), 2014 IEEE (pp. 2043-2048)
Lüddemann, Tobias; Schiebl, Jonas; Roppenecker, Daniel; Klein, Franziska; Lueth, Tim C.;, "Towards a logic-based extension of a relational software tool for coherent technical documentation of medical devices", in IEEE International Symposium on Product ComplianceEngineering (ISPCE), Chicago, USA, 2015, pp. 1-6
Dingler, Max; Dietz, Christian; Pfeiffer,Jonas; Lueddemann, Tobias; Lüth, Tim; , "A Framework for Automatic Testing of Medical Device Compatibility", Proceedings of the 13th IEEE International Conference on Telecommunications (ConTEL2015), July 13th-15th, Graz, Austria, pp. 1-8
Dingler, Max E.; Pfeiffer, Jonas H.; Lüth, and Tim C; , "A novel real time alarm detection device for the operating room", Proceedings of the 6th IEEE International Conference on Automation, Robotics and Applications (ICARA 2015), February 17-19, 2015, Queenstown, New Zealand, pp. 490-494
Pfeiffer, Jonas; Dingler, Max Emanuel; Dietz, Christian; Lueth, Tim C.; , "Requirements and Architecture Design for Open Real-Time Communication in the Operating Room", Proceedings of the 2015 IEEE Conference on Robotics and Biomimetics (ROBIO 2015), December 6-9, 2015, Zhuhai, China.