Based on experience and some definitions, the basics of statics are taught. Statics is the science of the equilibrium of forces on resting bodies and is considered an important basic field whose methods and results are also of relevance to other subfields of mechanics. Important topics are free body diagrams, the application of the equilibrium conditions to plane and spatial systems that are statically determinate as well as the principle of virtual work. With the help of these tools static loads of components and reaction forces can be determined.
The lecture deals with the kinematics and kinetics of rigid bodies under the influence of forces. The task of kinematics is to determine position, velocity and acceleration of
systems as functions of time. Kinetics, on the other hand, deals with the causes of motion. It examines the relationship between forces and movements, which can be formulated with the help of Newton's fundamental law, the law of momentum and angular momentum, and the law of work and energy. A systematic derivation of the equations of motion is made possible by Lagrange II formalism.
Technical mechanics is a fundamental discipline in engineering sciences. The goal is to describe the deformation and motion of bodies caused by forces. The range of subjects in this course covers statics and the computation of reactions in planar structures, kinetics and the description of rigid body motions. Newton's and Euler's laws and advanced dynamic methods are used to describe the behavior of multibody systems. Finally the fundamentals of elastostatics are covered and simple planar problems like calculating the bending in Bernoulli beams is demonstrated.
The energy and variational principles of analytical mechanics have gone a long way since the axioms of Newton. Today they are found in the extremely successful test- and simulation software used in industry (e.g. experimental modal analysis, multibody simulations, finite element codes, etc.). The aim of the lecture is to equip the student with the most important basics and “thought concepts” for understanding the different methods and classifying them. The student will therefore be well prepared for a more thorough study of the different application fields of mechanical theories and specialization areas. An ambitious goal!
Starting with the principle of virtual work, we will derive the Lagrange and Newton Euler equations step by step. These methods will allow us to derive the equations of motion for complex mechanical systems (automatically). By linearizing of the (often highly non-linear) equations we will be able to examine the stability of systems around an equilibrium position and introduce the fundamentally important concepts of modal analysis and model reduction. To conclude the lecture, we will derive analytical methods to solve the differential equations of motion for one-dimensional continua (bars and beams). The more generally applicable approximation methods such as Rayleigh-Ritz and the FEM, will be derived in the context of the virtual work principle and their convergence will be studied with the comparison to the analytical solutions.
In modern systems structural components move and vibrate in a complex environment where coupling with forces arising from, for instance, acoustics, electrostatics, thermal effects or magnetics play an important role. We will therefore, in this course, shortly explain the key basics of dynamics and build on this the influence of such multiphysical interaction on the dynamical behavior of mechanical system. Such topics are certainly of interest not only for students from mechanical engineering, but also for electrical or civil engineers for instance.
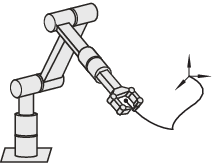
In this course, students learn to describe the kinematics of rigid tree-structured robots and to model their dynamics. Building on this, basic methods for trajectory planning and optimization are introduced. Finally, typical control concepts for different tasks are presented. The theoretical basics are each illustrated by simple examples.
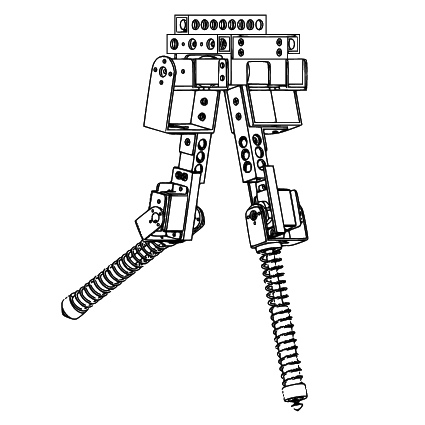
This course is using the example of a bipedal walking robot to teach biorobotics concepts. Additionally the training of important soft skills (communication, literature research, presentation, feedback, use of different media) will be encouraged. Students learn how to tackle complex problems from a variety of possible angles, explore solutions and develop them in a group environment. Students will document their learning progress in 10 assignment submissions throughout the lecture period.
At the end of this course students are able
- to explain concepts for using biological insights for solving technical problems and apply them to specific problems
- to describe the role of models for the knowledge transfer from biology into robotics, to characterize their specific limitations and to apply them to technical problems
- to differentiate advantages and disadvantages of bio-inspired optimization algorithms and to apply them to optimize their solutions
- to apply the acquired knowledge to a practical experiment and design a controller for a legged robot
[learn more]
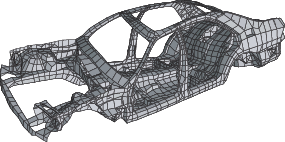
Multibody systems are technical systems consisting of different rigid or flexible bodies. The connections may be modeled with classical force laws or realized by kinematical constraints. In the meantime multibody simulation programs are well established and can be found in a variety of industrial sectors, for example in aeronautical engineering or in the automobile industry. The course focuses on the underlying fundamentals and numerical algorithms of multibody simulation.
The aim of the lecture is to revise the general theory of vibration in solids and structures, understand the various analysis types (free vibrations, harmonic analysis and time response), and to have a thorough understanding of the important numerical procedures necessary to perform the modelling and simulation of real engineering problems. Special focus is placed on the link between numerical methods and application.
Contents::
- Finite element modeling
- Damping models
- Linear solvers
- Eigensolvers
- Model reduction
- Modal sensitivity
- Elastodynamics
- Time integration
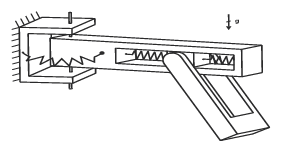
The lecture Machine Dynamics apply knowledge of engineering mechanics to problems of real machines. A special focus is on dynamics and the occurence of vibrations. A set of selected phenomena are explained on simplified models of real applications. Machine dynamics enables models that predict unwanted vibrations and ways to compensate them.
The lecture covers the following topics:
- Crank slider mechanism
- Linear vibrations systems with one or more degrees of freedom
- Rotor dynamics
- Machine foundations and supports to isolate vibrations
- Continous vibratory systems
Every moving machine causes vibrations that might be harmful to itself or its surrounding environment. In this lecture, we provide basic knowledge to experimentally analyze vibrating systems. While we are trying to convey the necessary basic theory, we also try to focus on the application of experimental techniques using practical examples.
The main topics of this lecture are:
- Modelling of dynamic system in the time and frequency domain.
- Digital Signal Processing.
- Experimental Modal Analysis.
We also give two lab tours during the lecture, showing practical examples of test setups.

The seminar consists of several lectures from external speakers. Our aim is to go beyond the master courses taught at the chair and see the bigger picture of advanced mechanics, i.e. current research topics in academia and development trends in industry. It is intended for students with a firm grasp of mechanical concepts, taught in our master courses. The lectures cover topics such as structural and multibody dynamics, robotics, mechatronics, non-linear mechanics and multi-physics. Students who intend to get the 3 ECTS should prepare a small literature review about one lecture (of their choice) and give a 15 minutes presentation. The lectures are either held in German or English.
This lab seminar enables the application of methods for experimental vibration analysis. The aim is to provide students with tools for identifying and distinguishing typical vibration phenomena on real machines and structures. The lab seminar includes the following experiments:
- FFT: Analysis of synthetic signals
- Strain gauges:Measurement with strain gauges
- Magnetic bearings: dynamic characteristics
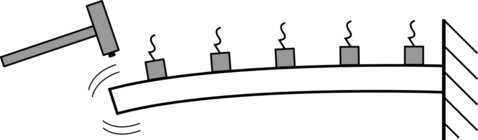
- Beam: Eigenfrequencies and mode shapes
- Modal analysis: Modal parameter of an academic structure
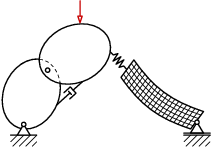
In this course, the different mechanisms of the origin of mechanical vibrations are to be worked out in the context of a practical course. The aim is to build a bridge between theory and practice. The practical course includes the following experiments:
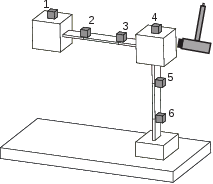
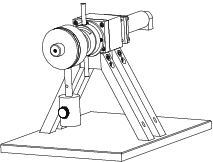
- MoI: moment of inertia through torsion pendulum
- Balancing bar: rigid rotor, balancing machine
- Parametric pendulum: parametric excitation, stability
- Balancing bar: upright pendulum, stabilization with controller
- Friction pendulum: self-excitation, phase curve
This course covers the basic computational aspects of structural dynamics and the practical implementations required to analyze the behavior of linear structures using PYTHON. The course mainly addresses solution algorithms for static, modal, harmonic and transient problems that are encountered in structural dynamics but also takes a look at e.g. damping and model reduction. The tasks, templates and tutorials of this course are provided as JUPYTER Notebook. The student’s task is to complete the implementation of the given source code templates, to answer the given questions and to document the results in their own JUPYTER Notebook. It is strongly recommended to participate – simultaneously or previously – in the lecture Structural Dynamics (MW2391) in order to cover the required theoretical background.