Lehre
Lehrveranstaltungen
Aufbauend auf Erfahrungstatsachen und einigen Definitionen werden die Grundlagen der Statik vermittelt. Sie ist die Lehre vom Gleichgewicht der Kräfte an ruhenden Körpern und gilt als wichtiges Grundlagengebiet, dessen Methoden und Ergebnisse auch für andere Teilgebiete der Mechanik von Bedeutung sind. Eine zentrale Rolle spielen dabei das Anfertigen von Freikörperbildern,
die Anwendung der Gleichgewichtsbedingungen auf ebene und räumliche statisch bestimmte Systeme sowie das Prinzip der virtuellen Arbeit. Mit Hilfe dieser Werkzeuge lassen sich statische Beanspruchung von Bauteilen und Lagerreaktionen ermitteln.
Die Vorlesung beschäftigt sich mit der Kinematik und Kinetik von starren Körpern unter der Einwirkung von Kräften. Aufgabe der Kinematik ist es, Lage, Geschwindigkeit und Beschleunigung von
Systemen als Funktionen der Zeit zu beschreiben. Die Kinetik hingegen beschäftigt sich mit den Ursachen der Bewegung. Dabei wird der Zusammenhang zwischen Kräften und Bewegungen untersucht, der mit Hilfe der Newtonschen Grundgesetzes, des Impuls- und Drehimpulssatzes sowie des Arbeits- und Energiesatzes formuliert werden kann. Eine systematische Herleitung der Bewegungsgleichungen ermöglicht der Lagrange II-Formalismus.
Die Mechanik als Teilgebiet der Physik ist eine grundlegende Disziplin in den Ingenieurwissenschaften. Sie beschäftigt sich mit der Beschreibung und Vorherbestimmung der Verformung und Bewegung von Körpern und mit den damit einhergehenden Kräften. Inhalt der Vorlesung ist in der Statik die Berechnung von ruhenden, ebenen Tragwerken und die Beschreibung von Starrkörperbewegungen in der Kinematik. Mit Impuls- und Drallsatz sowie weiterführenden Methoden ist die Dynamik starrer Körper und Mehrkörpersysteme wichtiger Bestandteil. Schließlich wird auch die Elastostatik in Form von einfachen, ebenen Problemen, z.B. dem Bernoulli-Biegebalken sowie die Elastodynamik zur Berechnung von Eigenfrequenzen einfacher ebener Systeme, behandelt.
Ausgehend von Newtons Axiomen stellen die Energie- und Variations-Methoden der Analytischen Mechanik eine substantielle Weiterentwicklung dar. Heute finden sie sich, wenn auch scheinbar versteckt, in extrem erfolgreicher Test- und Simulationssoftware wieder (Experimentelle Modal Analyse, Mehrkörpersimulation, Finite Element Methode, …). Ziel der Vorlesung ist es, den Studenten die wichtigsten Grundlagen und „Denkwerkzeuge“ an die Hand zu geben um solche Methoden klassifizieren und beurteilen zu können. Es werden somit die besten Voraussetzungen für ein tieferes Studium einzelner Fachgebiete der Mechanik geschaffen. Ein ambitioniertes Ziel!
Ausgehend vom Prinzip der virtuellen Arbeit werden die Lagrange und Newton Euler Formalismen hergeleitet. Mit diesen Methoden werden (automatisiert) die Bewegungsgleichungen von komplexen mechanischen Systemen aufgestellt. Durch Linearisierung der oft hochgradig nicht-linearen Gleichungen, wird die Stabilitätsanalyse von Gleichgewichtslagen ermöglicht und die wichtigen Begriffe der Modalzerlegung und Modellreduktion werden eingeführt. Abschließend werden analytische Methoden vorgestellt um die differentiellen Bewegungsgleichungen von eindimensionalen Kontinua (Stäben und Balken) zu lösen. Die Approximationsmethoden nach Rayleigh-Ritz und die Finite Elemente Methode werden im Kontext des Prinzips der virtuellen Arbeit hergeleitet und deren Konvergenzverhalten anhand der analytischen Lösungen untersucht und beurteilt.
In modernen Systemen bewegen sich und schwingen mechanische Komponenten in einer komplexen Umgebung, in der die Kopplung mit Kräften, z.B. aus der Akustik, Elektrostatik, Thermik oder Magnetik, eine wichtige Rolle spielt. In diesem Kurs werden wir daher kurz die wichtigsten Grundlagen der Dynamik erläutern und darauf aufbauend den Einfluss solcher multiphysikalischen Wechselwirkungen auf das dynamische Verhalten eines mechanischen Systems. Diese Themen sind nicht nur für Studierende des Maschinenbaus, sondern auch für Studierende aller anderen Ingenieurdisziplinen von Interesse.
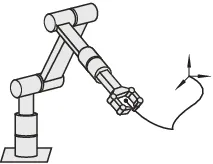
In dieser Veranstaltung lernen Studierende die Kinematik steifer baumstrukturierter Roboter zu beschreiben und deren Dynamik zu modellieren. Aufbauend darauf werden grundlegende Verfahren zur Trajektorienplanung und Optimierung eingeführt. Abschließend werden typische Regelungskonzepte für unterschiedliche Aufgabenstellungen vorgestellt. Die theoretischen Grundlagen werden jeweils durch einfache Beispiele erläutert.
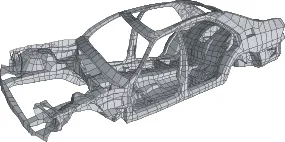
Mehrkörpersysteme sind technische Systeme welche sich aus starren und/oder flexiblen Körpern zusammensetzen. Die Verbindungen zwischen den Körpern können über klassische Kraftgesetze oder kinematische Zwangsbedingungen modelliert werden. Heutzutage ist Software zur Simulation von Mehrkörpersystemen weit verbreitet und wird industriell in verschiedensten Bereichen eingesetzt, zum Beispiel in Luft- und Raumfahrt oder der Automobilindustrie. Die Vorlesung vermittelt die zugrunde liegende Theorie sowie numerische Algorithmen zur Simulation von Mehrkörpersystemen.
Der Inhalt des Moduls umfasst die allgemeine Beschreibung von Schwingungen in Strukturen, eine Übersicht von verschiedenen Analyseverfahren und eine detaillierte Erklärung von wichtigen numerischen Methoden, die nützlich sind, um echte Strukturen zu modellieren und simulieren. Besonderer Wert wird auf die Verbindung zwischen numerischen Methoden und Anwendung gelegt.
Inhalt:
- Finite Elemente
- Dämpfungsmodelle
- Lineare Löser
- Eigenwertproblemlöser
- Modellreduktion
- Sensitivitätsanalyse
- Elastodynamik
- Numerische Zeitintegration
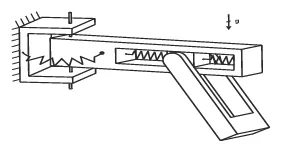
The Vorlesung Maschinendynamik wendet das Wissen aus den Grundlagenvorlesungen Technischen Mechanik auf Probleme an realen Maschinen an. Ein besonderes Augenmerk liegt auf der Dynamik und dem Auftreten von Schiwngungen. An ausgewählte Beispielen von (vereinfachten) Modellen realer Maschinen werden spezielle Phänomene erklärt. Die Maschinendynamik ermöglicht Modelle, die unter anderem ungewollte Schwingungen voraussagen, sowie Möglichkeiten zur Kompensation aufzeigen können.
Die Vorlesung umfasst folgende Themen:
- Schubkurbel Systeme
- Lineare Schwinger mit einem oder mehreren Freiheitsgraden
- Rotordynamik
- Maschinenaufstellung und Schwingungsisolierung
- kontinuierliche Schwingungssysteme
Jede sich bewegende Maschine verursacht Vibrationen, die für sich oder der Umgebung schädlich sein können. In dieser Vorlesung vermitteln wir Grundkenntnisse zur experimentellen Analyse schwingender Systeme. Während wir versuchen die notwendige Grundtheorie zu vermitteln, konzentrieren wir uns auch auf die Anwendung experimenteller Methoden anhand praktischer Beispiele.
Die Schwerpunkte dieser Vorlesung sind:
- Modellierung eines dynamischen Systems im Zeit- und Frequenzbereich.
- Digitale Signalverarbeitung.
- Experimentelle Modalanalyse.
Während der Vorlesung geben wir auch zwei Laborführungen mit praktischen Beispielen von Versuchsaufbauten.

Im Rahmen der Vortragsreihe ‚Angewandte Mechanik Seminar‘ finden mehrere Vorträge und Vorlesungen von Gästen aus Wissenschaft und Industrie am Lehrstuhl für Angewandte Mechanik statt. Ziel der Lehrveranstaltung ist es über angebotene Masterkurse hinaus, aktuelle Themen aus Wissenschaft und Industrie zu diskutieren und Angewandte Mechanik in einem breiteren, außeruniversitären Kontext erlebbar zu machen. Das Seminar richtet sich an Studierende mit einem soliden Verständnis mechanischer Konzepte und dem Interesse weiterführende Ideen und Trends kennenzulernen. Der Inhalt der Vorlesungen ist unter Anderem Struktur- und Mehrkörperdynamik, Robotik, Mechatronik sowie nichtlineare, multi-physikalische Mechanik. Zum Erhalt der 3 ECTS sind eine knappe Literaturrecherche zu einer der Vorlesungen, sowie eine 15-minüige Präsentation über den Inhalt notwendig. Die Vorlesungen finden in Deutsch oder Englisch statt.
Diese Modulveranstaltung ermöglicht die Anwendung von Methoden zur experimentellen Schwingungsanalyse. Das Ziel besteht darin, den Studierenden Werkzeuge zur Identifizierung und Unterscheidung typischer Schwingungsphänomene an realen Maschinen und Strukturen an die Hand zu geben. Das Praktikum umfasst folgende Versuche:
- FFT: Analyse synthetischer Signale
- DMS: Messung mit Dehnmessstreifen
- Magnetlager: Dynamische Kenngrößen
- Balken: Eigenfrequenzen und Schwingformen
- Modalanalyse: Modalparameter eines Ständers
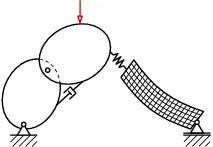
Ziel des Praktikums ist es, den Entstehungsmechanismus mechanischer Schwingungen zu verstehen und eine Brücke zur praktischen Anwendung und Laborarbeit zu schlagen. Das Praktikum umfasst folgende Versuche:
- MTM: Massenträgheitsmomente durch Torsionspendel
- Auswuchten: Starrer Rotor, Auswuchtmaschine
- Rüttelpendel: Parametererregung, Stabilität
- Balancierstab: Stehendes Pendels, Stabilisierung mit Regler
- Reibpendel: Selbsterregung, Phasenkurve
Im Zentrum des Praktikums Strukturdynamik steht die Implementierung von Algorithmen zur Analyse linearer Strukturen mittels PYTHON. Der Kurs konzentriert sich auf grundlegende Lösungsstrategien statischer, modaler, harmonischer und transienter Probleme, Aspekte wie Dämpfung und Modellreduktion werden ebenfalls behandelt. Die Aufgaben, Vorlagen und (Video)-Tutorien werden als JUPYTER Notebook bereitgestellt. Aufgabe der Studierenden ist den gegeben Quellcode zu vervollständigen, die gegeben Fragen mithilfe des Codes zu beantworten und die Ergebnisse in einem eigenen JUPYTER Notebook zu dokumentieren. Es wird dringend empfohlen vor oder während der Teilnahme am Praktikum an der Vorlesung Strukturdynamik (MW2391) teilzunehmen.
Diese Veranstaltung vermittelt umfassende Kenntnisse in der Bahnplanung sowie der Steuerung und Regelung von Robotern. Die Inhalte reichen von der Kinematik (Denavit-Hartenberg, inverse Kinematik, Driftkompensation) über die Bahnplanung mittels Polynomen und Splines bis hin zur Dynamik und modernen Regelungskonzepten wie der Impedanz- oder hybriden Kraft/Positionsregelung.
Der Fokus liegt dabei auf der praktischen Anwendung: Die Studierenden programmieren die Algorithmen eigenständig in Python und implementieren diese direkt auf Industrierobotern.
Die Vorlesung ist eine Mischung aus Mehrkörper- und klassischer Maschinendynamik; Zweige der Ingenieurwissenschaften, die sich mit der Simulation von Fahrzeugen, Flugzeugen, Maschinen und Mechanismen beschäftigen. Die folgenden Themen bilden die Grundlage für derartige Simulationsumgebungen:
• Kinematik und Dynamik von Starrkörpersystemen mit lokalisierten Elastizitäten (Lagerbuchsen, etc.) und Zwangsbedingungen/Gelenken (Drehgelenk, Prismatisches Gelenk, etc.) sowie einfachen Antrieben/Aktuatoren
• Linearisierte Bewegungsgleichungen für starre Körper mit flexibler Lagerung (Rotordynamik, Schwingungsanalyse von Maschinen, etc.)
• Zeitintegration (maßgeschneiderte Verfahren für Mehrkörpersysteme, z. B. HHT-Methode, etc.)
• Grundlegende Überlegungen zur Computerimplementierung