KIRO - KI-basierte Roboterapplikationen für eine einfache Skalierung und optimierte Auslastung
Industrieroboter wurden lange Zeit hauptsächlich in der Großserienproduktion eingesetzt. Jedoch zeigen aktuelle Entwicklungen, dass ein großes zukünftiges Einsatzpotential auch für kleinere Stückzahlen bis hin zur kundenindividuellen Produktion besteht. Dies stellt Unternehmen jedoch vor neue Herausforderungen. Für einen wirtschaftlichen Einsatz muss der Roboter dazu in der Lage sein, vielfältige Prozesse für unterschiedliche Varianten auszuführen sowie schnell zwischen unterschiedlichen Aufgaben zu wechseln und deren Abarbeitung zu kombinieren. Jedoch zeichnen sich Roboterapplikationen zumeist durch eine hohe Systemkomplexität und einer fehlenden Flexibilität aus. Zusätzlich fehlt oftmals Expertenwissens zur Umsetzung dieser im Unternehmen, weshalb der Einsatz von Industrierobotern in variantenreichen Produktionen aktuell meist sehr arbeits- und zeitintensiv ist.
Zielsetzung
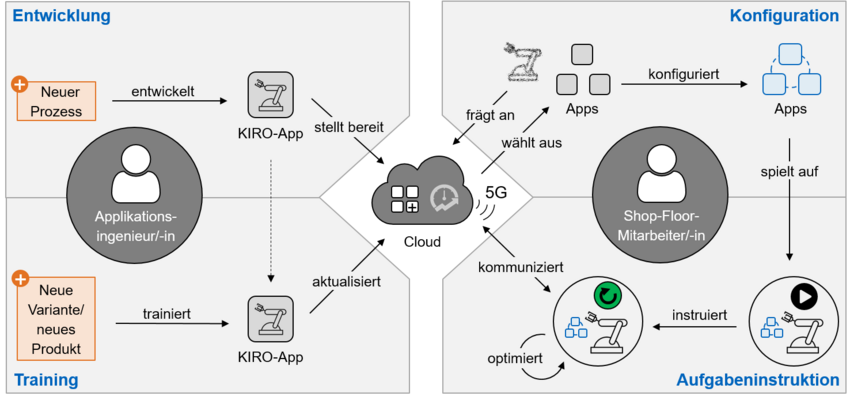
Ziel dieses Forschungsvorhabens ist die Vereinfachung der Realisierung von Roboterapplikationen, indem das dafür benötigte Expertenwissen sowie der Arbeit- und Zeitaufwand reduziert werden. Unternehmen sollen dadurch befähigt werden in Zukunft schnell und einfach vielfältige Roboterapplikationen in einer variantenreichen Produktion wirtschaftliche einzusetzen und skalieren zu können. Um diese Zielsetzung zu erreichen wird eine Entwicklungsplattform aufgebaut, die in der Lage ist mit Hilfe künstlicher Intelligenz einmal entwickelte Roboterapplikationen in kurzer Zeit für neue Aufgaben anzupassen. Dabei soll einerseits die Greiftechnik betrachtet werden, um den aufwändigen Entwicklungsprozess von Greifersystemen sowie die Übertragbarkeit der Greifplanung auf neue Varianten zu verbessern. Andererseits sollen Roboter zur autonomen Aufgabenplanung und -ausführung befähigt werden, um eine wertschöpfungsoptimierte Auslastung der im Unternehmen verfügbaren Roboter zu erreichen. Zudem wird eine neuartige Methodik zur Einsatzplanung von Roboterflotten entwickelt, wodurch eine optimierte Verteilung der verfügbaren Roboter im Betrieb erreicht wird.
Forschungsschwerpunkte
- Methodischer Baukasten für Plug-&-Play-Greifersysteme
- KI-basierte Entwicklung- und Trainingsplattform für Roboterapplikationen
- Auslastungsoptimierte Einsatz- und Aufgabenplanung
Konsortium
Das Konsortium setzt sich aus vier Unternehmen (Conti Temic microelectronic GmbH, ITQ GmbH, KABTEC AG, Rohde & Schwarz Messgerätebau GmbH), zwei assoziierenden Partnern (Roboception GmbH, Yaskawa Europe GmbH) und dem Institut für Werkzeugmaschinen und Betriebswissenschaften (iwb) der TU München zusammen.
Danksagung
Das Projekt KIRO wird durch das Bayerische Staatsministerium für Wirtschaft, Landesentwicklung und Energie gefördert und durch den Projektträger VDI/VDE Innovation + Technik GmbH administrativ betreut. Das iwb bedankt sich herzlich bei allen Partnern für die Förderung, die Unterstützung und die gute Zusammenarbeit im Projekt.
| Laufzeit | 01.10.2021 - 31.09.2024 |
| Förderer | Bayerisches Staatsministerium für Wirtschaft, Landesentwicklung und Energie |