KIRO - AI-based robot applications for easy scaling and optimized operation
For a long time, industrial robots were mainly used in large-scale production. But current developments show a huge application potential of industrial robots for smaller quantities and customized production. However, using robots in these new application bears new challenges. To be economically profitable, the robot must be capable of executing a wide range of processes for diverse variants. In addition, it must be possible to switch quickly between different tasks and combine their execution. However, robot applications are usually characterised by a high complexity and a lack of flexibility. In addition, there is often a lack of expert knowledge for implementation in the company, which is why the use of industrial robots in multi-variant production is currently very labour-intensive and time-consuming.
Objective
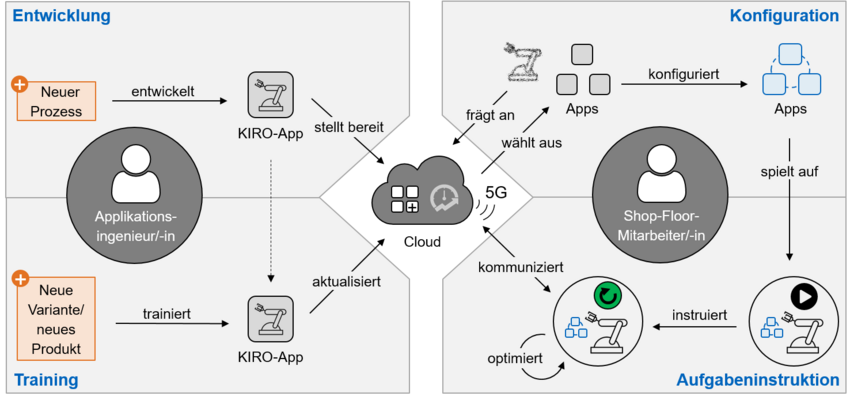
The research project KIRO aims to simplify the realization of robot applications by reducing the required expert knowledge and the amount of work and time required. In the future, companies should be able to quickly and efficiently implement and scale various robot applications in a flexible production environments. Therefore, a development platform for robot applications is developed, that can adapt applications for new tasks rapidly by using artificial intelligence. On the one hand, the gripping technology needs to be considered in order to improve the complex development process of gripper systems and the transferability to new variants. On the other hand, the robots will be enabled for autonomous task planning and execution, to achieve an optimized utilization of the robots available in the company. Finally, a novel methodology will be developed for deployment planning of robot fleets, to accomplish a optimized distribution of the available robots.
Main research topics
- Development environment for plug-&-play gripper systems
- AI-based development and training platform for robot applications
- Workload-optimized task planning
Consortium
The consortium consists of four companies (Conti Temic microelectronic GmbH, ITQ GmbH, KABTEC AG, Rohde & Schwarz Messgerätebau GmbH), two associated partners (Roboception GmbH, Yaskawa Europe GmbH) and the Institute for Machine Tools and Industrial Management (iwb) of the Technical University of Munich.
Acknowledgments
The Bavarian Ministry of Economic Affairs, Regional Development, and Energy funds the KIRO project, and the VDI/VDE Innovation + Technology GmbH administratively supports the project consortium. The iwb thanks all partners for the funding, the support, and the excellent cooperation in the project.