RoBerD – Robotergestützte visuelle Befundung in der Demontage
Die Wiederaufbereitung bestehender Produkte bietet vielfältige Chancen aus ökologischer und ökonomischer Perspektive. Aufgrund der hohen Variantenvielfalt, der schlechten Planbarkeit des Produktrücklaufs und der unsicheren Produktzustände erfolgt der Prozess bislang überwiegend manuell. Eine rein manuelle Ausführung ist angesichts hoher Personalkosten und eines anhaltenden Fachkräftemangels langfristig kaum wirtschaftlich skalierbar. Einen zentralen Prozessschritt stellt die Befundung der demontierten Produktkomponenten (z. B. hinsichtlich Verschleiß) dar, da hier über Wiederverwendung und notwendige Aufbereitungsschritte entschieden wird. Im Projekt RoBerD wird daher untersucht, ob sich dieser Befundungsprozess durch den Einsatz von Robotik automatisieren lässt.
Zielsetzung
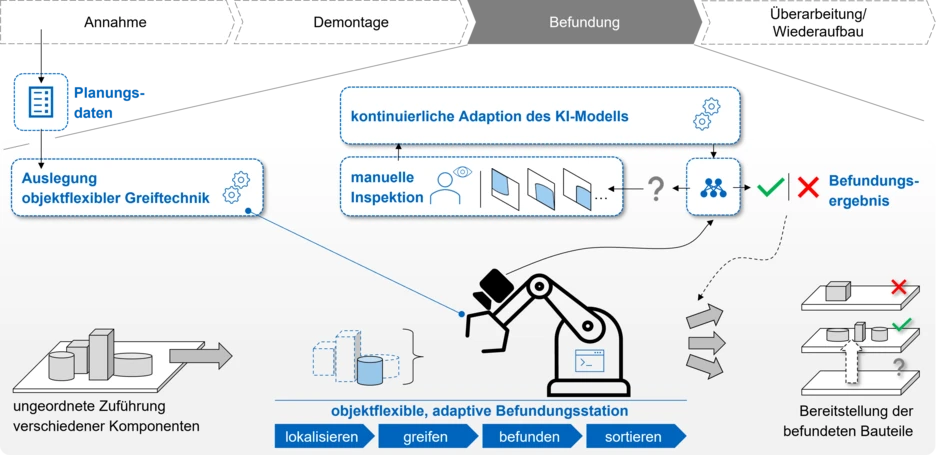
Ziel dieses Forschungsvorhabens ist die Entwickelung ein neuartiges, objektflexibles Robotik-System zur automatisierten Befundung variierender Produkte und kleiner Losgrößen. Die Bauteile werden nach Annahme demontiert, gereinigt und ungeordnet der Befundungsstation zugeführt; sie sind zu lokalisieren, zu greifen und für die Befundung zu positionieren. Dazu werden aus vorhandenen Produktdaten (z. B. Zeichnungen, CAD) automatisch Greifer ausgelegt, die eine hohe Varianz abdecken. Kamerabasierte KI bestimmt anhand relevanter Bildaufnahmen den Zustand und das Gesamtsystem stellt die Teile zur Wiederverwendung oder Überarbeitung bereit. Vorhersagen mit hoher Unsicherheit werden zwischengespeichert, von Mitarbeitenden geprüft und zur fortlaufenden Verbesserung der Modelle genutzt. So adressiert RoBerD die heutigen Automatisierungshürden, wie z. B. Variantenvielfalt, unbekannte Fehlerbilder und wechselnde Bedingungen, denen klassische Bildverarbeitung nicht gewachsen ist.
Forschungsschwerpunkte
- Objektflexible Greiftechnik
- KI-Algorithmen für die Befundung
- Gesamtsystem für die robotergestützte Befundung
Konsortium
Das Konsortium setzt sich aus drei Unternehmen (Endutec Maschinenbau Systemtechnik GmbH, InstruNEXT GmbH, MAN Truck & Bus SE), zwei assoziierenden Partnern (J.M. Voith SE & Co. KG, XITASO GmbH) und dem Institut für Werkzeugmaschinen und Betriebswissenschaften (iwb) der TU München zusammen.
Danksagung
Das Projekt RoBerD wird durch das Bayerische Staatsministerium für Wirtschaft, Landesentwicklung und Energie gefördert und durch den Projektträger VDI/VDE Innovation + Technik GmbH administrativ betreut. Das iwb bedankt sich herzlich bei allen Partnern für die Förderung, die Unterstützung und die gute Zusammenarbeit im Projekt.
| Laufzeit | 01.07.2025 - 30.06.2028 |
| Förderer | Bayerisches Staatsministerium für Wirtschaft, Landesentwicklung und Energie |