Lola - Gehen in unebenem Gelände
Trotz ihrer beeindruckenden Fähigkeiten können heutige zweibeinige Laufmaschinen noch nicht mit der Vielzahl an Laufsituationen und Störungen umgehen, die in einem praktischen Einsatz zu erwarten sind. Diese Einschränkungen erscheinen aus heutiger Sicht gravierender als die unter idealen Bedingungen erreichbare maximale Laufgeschwindigkeit, da sie im Kern die oft postulierte Überlegenheit von Laufmaschinen gegenüber Rad- oder Kettenfahrzeugen in unwegsamem Gelände und auf unebenem Untergrund infrage stellen.
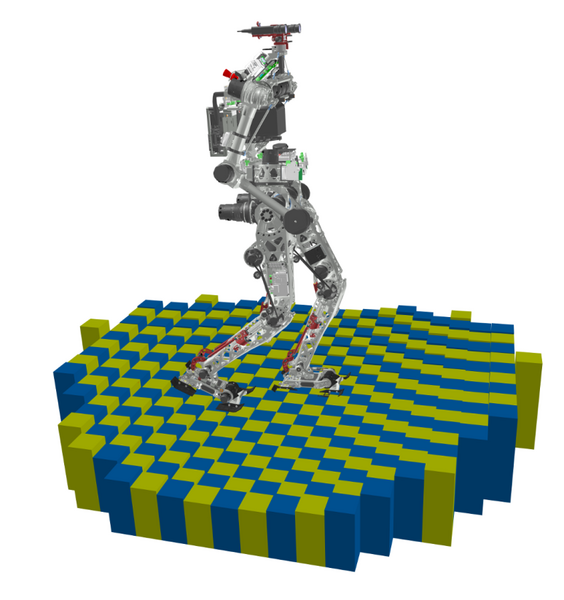
Im Rahmen des DFG Projekts „Flexibles und robustes Gehen in unebenem Gelände“ wird daher die Technologie für deutlich robusteres und flexibleres Gehen in unebenem und unbekanntem Gelände erforscht werden, um so einen Schritt hin zu Einsätzen außerhalb kontrollierter Laborbedingungen zu gehen und die prinzipiellen Vorteile zweibeinigen Laufens in unebenem Gelände ein Stück weit unter Beweis zu stellen. Die Ansätze werden theoretisch, durch Dynamik-Simulationen und durch Laufexperimente untersucht. Als Versuchsträger dient der zweibeinige Roboter Lola.
Unter Flexibilität verstehen wir hier vor allem die Fähigkeit, einen großen Bereich seiner physikalischen Bewegungsmöglichkeiten auch tatsächlich auszunutzen. Dies ist etwa beim Be- und Übersteigen komplexer, zuvor unbekannter Objekte notwendig, wird aber auch bei sehr großen Schritten relevant. Unter Robustheit verstehen wir die Fähigkeit des Systems, auch bei größeren Störungen ein Umfallen zu vermeiden, was nur durch eine größere Änderung der ursprünglich vorgesehenen Bewegung möglich ist.

DFG Projektabschluss
Software
Publicly Available Software Libraries developed within the project:
- lepp2 - Lola Environment Perception Package v2
- lepp3 - Lola Environment Perception Package v3
- HoLola - Holographic Data Visualization for Lola
- LolAR - Augmented-Reality Visualization for Lola
- ARVisualizer - Awesome Robot Visualizer
Danksagung
Dieses Projekt wird finanziert von der Deutschen Forschungsgemeinschaft (DFG) im Rahmen des Paketantrags „Flexibles und robustes Gehen in unebenem Gelände“ (BU 2736/1-1).