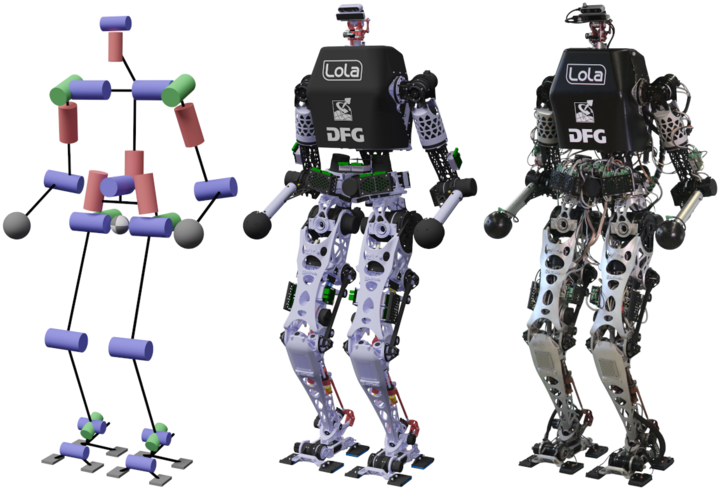
Within the DFG project "Adaptives Laufen durch Multi-Kontakt Stabilisierung und Nutzung von Teilkontakten für humanoide Roboter" (project number 407378162) the research prototype LOLA has been upgraded. For this, the complete upper body of the robot, consisting of the torso and the arms, has been re-designed, analysed and finally realized. The changes made significantly increase the reachable taskspace of the hands such that it is possible to support against walls in the lateral proximity of the robot. Special focus was laid on an increased load capacity of the upper body in order prepare the robot for the higher contact forces. The modifications of the robot have been finished recently. In a video we show the main changes and a first analysis. For further information on our humanoid robot LOLA see https://www.mw.tum.de/en/am/research/current-projects/robotics/humanoid-robot-lola/.