FORobotics – Mobile, ad-hoc cooperating robot teams
By combining human-robot cooperation and mobile robot systems, a new form of teamwork can be defined within the factory. Those teams have the potential to increase flexibility and productivity along the value chain. The FORobotics research project focuses on mobile robot teams with aspects such as assisting robots, human-robot collaboration, and robot-robot collaboration in logistics and assembly.
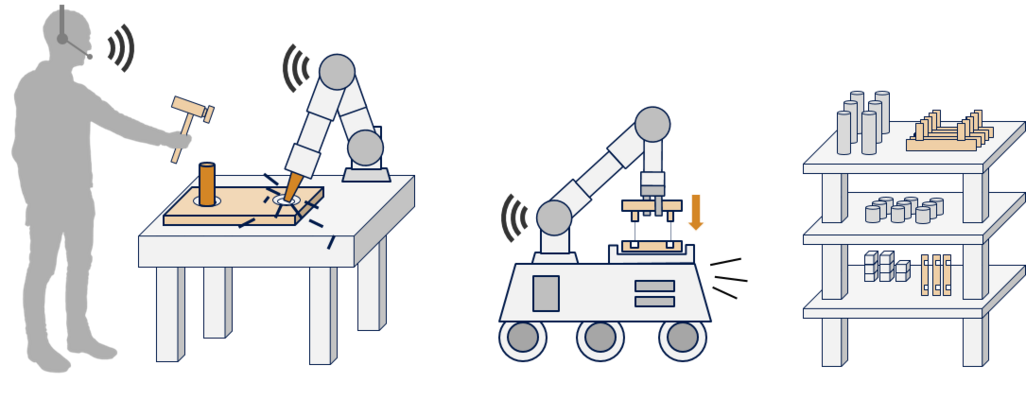
Mobile robots and humans with different capability profiles should cooperate to jointly solve a technical production task. To be able to form such a team, uniform interfaces and protocols are needed. Autonomous robot systems offer the potential to adapt actively to changing tasks and boundary conditions - even during direct cooperation with humans. The aim is to exploit new potentials for industrial production and assembly through the application-specific combinations of human and machine skills as well as the possibility of flexible team composition. The focus here is on the team's ability to react quickly to changes in production, to increase productivity along the value chain, and to increase the overall utilization of resources. From a scientific point of view, the following innovations result:
- consistent use of integrated data models in all use phases
- distributed and coordinated use of mobile robot systems
- situational change of production processes through ad hoc networking and human-machine cooperation
The research consortium involves eight research and 19 industrial partners over a period of three years. On the research side, the consortium includes the University of Augsburg, the University of Bayreuth, the Friedrich Alexander University of Nuremberg-Erlangen, the Technical University of Munich, the University of the German Federal Armed Forces Munich and the Fraunhofer IGCV from Augsburg.