RoKtoLas - Robot guided, scanner based Optical Coherence Tomography for remote laser beam welding to increase the flexibility of process chains in car body construction
Using an innovative sensor concept, remote laser beam welding is to be qualified for large-area use in automotive body construction. For this purpose, the joint project RoKtoLas is researching highly flexible production systems for the use in car body construction.

Innovative leap in automotive body construction
In order to be able to control the rising number of variants due to an increasing electrification as well as the ever faster innovation and product life cycles, RoKtoLas aims to achieve an innovative leap in automotive body construction. This is to be realized by a technology substitution in the field of joining technology, whereby conventional resistance spot welding is to be replaced by remote laser beam welding.
The project focuses on an optical sensor unit, which for the first time will enable an holistic and universal process monitoring in real time. In addition, an adapted component design and robot-based clamping technology form the core components for the construction of highly flexible production systems in body construction.
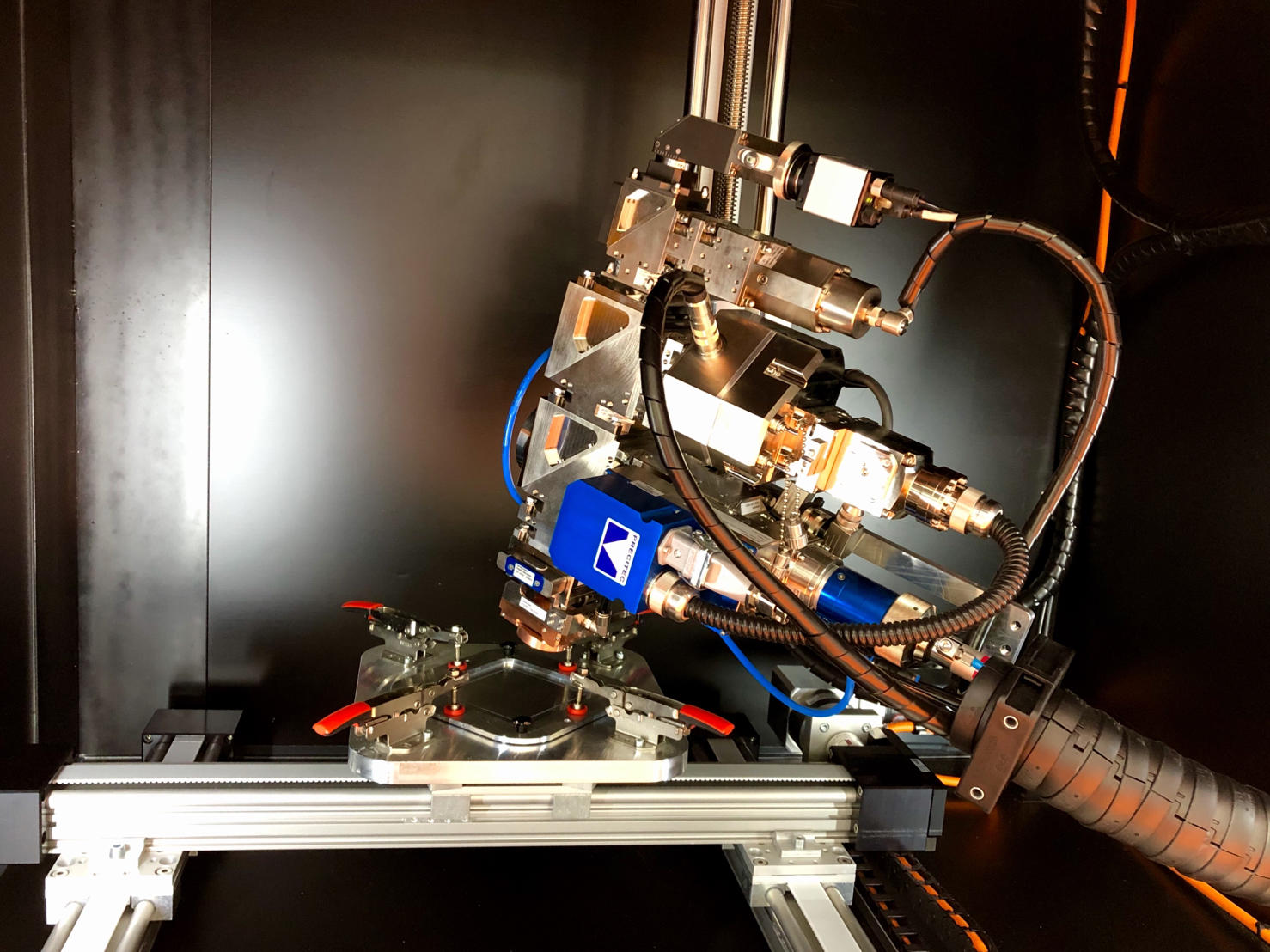
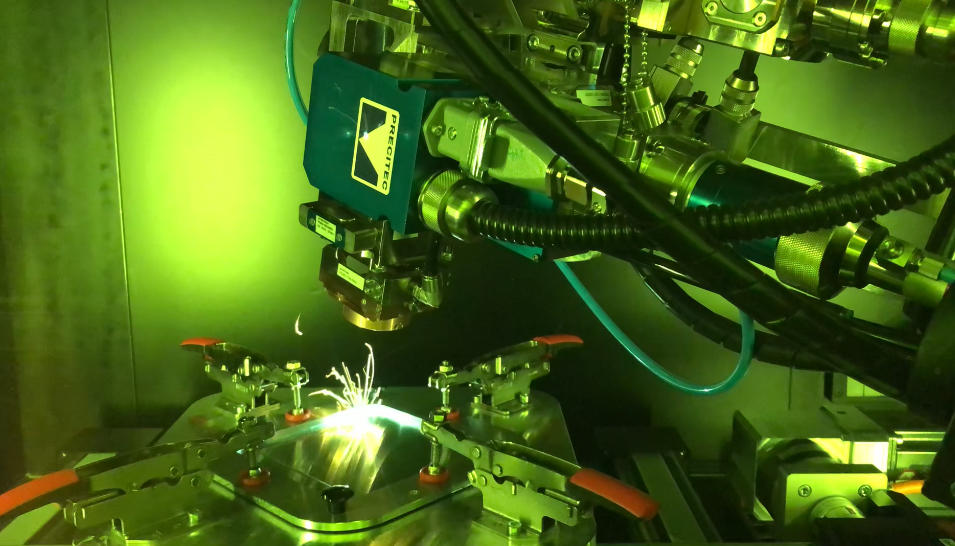
Optical coherence tomography - a universal and innovative sensor concept for remote laser beam welding
The sensor system based on optical coherence tomography (OCT) forms the core of the solution approach for making automotive bodywork production more flexible. The OCT system allows a comprehensive generation of process data in the area of the joining zone. Due to the measuring principle, which is based on an interferometer design, the seam position, the welding depth and the seam topography can be determined largely independently of process emissions. This allows dynamic seam tracking, real-time process control and comprehensive quality assurance to be combined in one system.
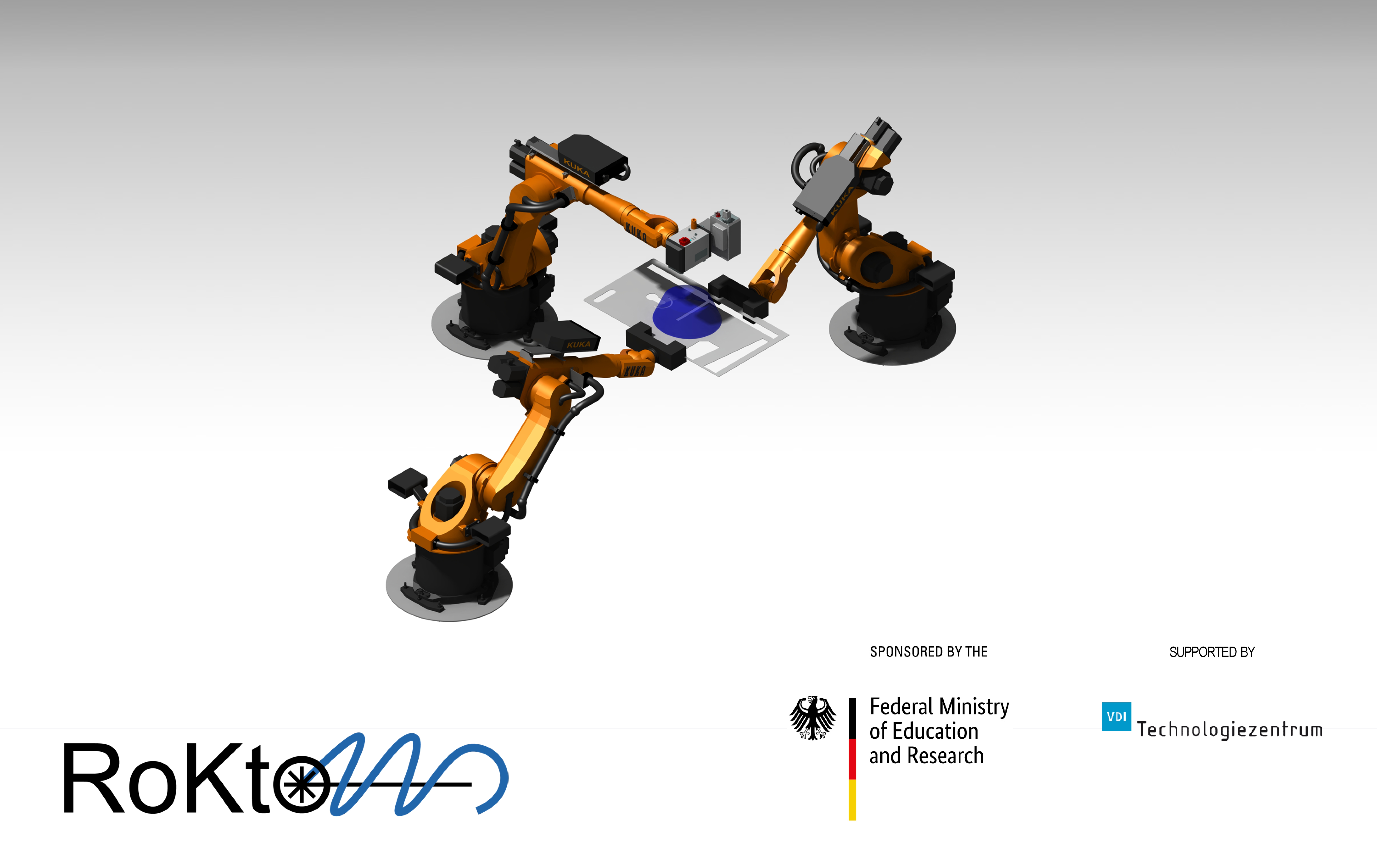
Remote laser beam welding for flexible production in electromobility
Conventional joining processes in car body construction severely limit the component design due to the rigid geometry of the clamping devices used. Remote laser beam welding, on the other hand, places much lower demands on the accessibility of the joint and thus permits a component design more suited to the load. In addition, a fixture-free joining can be made possible by an adapted component design. To this end, a robot-based clamping technology is being designed and developed as part of the project. The clamping situation can be assessed on the basis of the data from the optical sensor and adjusted using active grippers. In order to control tolerances and make efficient use of the large number of degrees of freedom of the new clamping technology, an intelligent positioning of components is to be developed by methods of machine learning.
In summary, the new optical sensor concept enables a comprehensive process data generation in the sense of a networked production and thus represents the prerequisite for the implementation of a highly flexible production. At the end of the project, the findings will be combined by a functional demonstrator of a flexible production cell.
Acknowledgement
The project presented is funded by the Federal Ministry of Education and Research (BMBF) under the funding code 13N14555 and supervised by the VDI Technology Center (VDI TZ). We thank the BMBF and the VDI TZ for their support and the good and trusting cooperation.
Selected publications
| 2020 | Numerical weld pool simulation for the accuracy improvement of inline weld depth measurement based on optical coherence tomography. Journal of Laser Applications 32 (2), 2020, 022036. (Details) |
| Investigation of the influences of the process parameters on the weld depth in laser beam welding of AA6082 using machine learning methods. Procedia CIRP 94, 2020, 702-707. (Details) | |
| Correlation analysis between the beam propagation and the vapor capillary geometry by machine learning. Procedia CIRP 94, 2020, 742-747. (Details) | |
| Real-time prediction of quality characteristics in laser beam welding using optical coherence tomography and machine learning. Journal of Laser Applications 32 (2), 2020, 022046. (Details) | |
| 2019 | Distortion minimization of laser beam welded components by the use of finite element simulation and Artificial Intelligence. CIRP Journal of Manufacturing Science and Technology 27, 2019, 11-20. (Details) |
| Numerical Weld Pool Simulation for the Accuracy Improvement of Inline Weld Depth Measurement Based on Optical Coherence Tomography. In: ICALEO Conference Proceedings 2019. (Details) | |
| Real-time Prediction of Quality Characteristics Based on Inline Process Data Using Machine Learning. In: ICALEO Conference Proceedings 2019. (Details) | |
| Kreuzkorrelation von Prozessparametern und der Einschweißtiefe beim Laserstrahlschweißen von Aluminiumlegierungen mittels Methoden des Maschinellen Lernens. In: DVS Congress 2019, 13-21. (Details) | |
| Real-time Prediction of Quality Characteristics in Laser Beam Welding Using Optical Coherence Tomography and Machine Learning. In: ICALEO Conference Proceedings 2019. (Details) | |
| A Genetic Algorithm for the Correlation of the Keyhole and the Melt Pool Depth in Laser Beam Welding of AA6082. Wissenschaftliche Gesellschaft für Lasertechnik e.V. (WLT): Proceedings of the Lasers in Manufacturing Conference (LiM) 2019. (Details) | |
| Holistic sensor concept for process control and quality assurance in laser beam welding based on Optical Coherence Tomography. Wissenschaftliche Gesellschaft für Lasertechnik e.V. (WLT): Proceedings of the Lasers in Manufacturing Conference (LiM) 2019. (Details) | |
| Inline weld depth measurement for high brilliance laser beam sources using optical coherence tomography. Journal of Laser Applications 31 (2), 2019, 022409. (Details) | |
| Ganzheitliches Qualitätssicherungskonzept für hochflexible Produktionsanlagen im Karosseriebau der Zukunft: Innovative Sensortechnologie und Datenauswertung mittels Künstlicher Intelligenz als Befähiger für hochflexible Fügetechnologien. Automobiltechnologie in Bayern + e-Car, 2019, 18--21. (Details) | |
| Holistic Quality Assurance System for Highly Flexible Production Systems in the Body Shop of the Future: Innovative Sensor Technology and Data Evaluation Using Artificial Intelligence as an Enabler for Highly Flexible Joining Technologies. Automotive Technology in Bavaria + e-Car, 2019, 18-21. (Details) | |
| Process control and quality assurance in remote laser beam welding by optical coherence tomography. Journal of Laser Applications 31 (2), 2019, 022408. (Details) | |
| 2018 | Inline Weld Depth Measurement for High Brilliance Laser Beam Sources using Optical Coherence Tomography. In: ICALEO Conference Proceedings 2018. (Details) |
| Process Control and Quality Assurance in Remote Laser Beam Welding by Optical Coherence Tomography. In: ICALEO Conference Proceedings 2018. (Details) | |
| Robot-based clamping technology enables individual joining: Highly flexible car bodies for the automotive industry of the future (Press release, TUM, German) | |
| Highly flexible remote laser beam welding for the car body production of the future. In: Automotive Technology in Bavaria + e-Car, 2018. (Details) | |
| Hochflexibles Remote-Laserstrahlschweißen für den Karosseriebau der Zukunft. In: Automobiltechnologie in Bayern + e-Car, 2018. (Details) | |
| 2017 | Project profile (Photonics Research Germany, German) |
| Next Stage of OCT for Remote Laser Welding: Photonics research project trargeting flexible, networked manufacturing (Press release, Blackbird Robotics) | |
| Flexibles Remote-Laserstrahlschweißen für den Karosseriebau (Newsletter iwb, German) | |
Project details
| Duration | 09/2017 - 08/2020 |
| Project Partner | BMW AG, Blackbird Robotics GmbH, Precitec GmbH & Co. KG, Emil Bucher GmbH, applicationtechnology GmbH & Co. KG, Technical University of Munich (Institute for Machine Tools and Industrial Management), Coherent GmbH (Associated partner) |
| Funded by | Federal Ministry of Education and Research (BMBF) - Support Initiative „Photonics for flexible, networked production - Optical sensors“ |
| Supported by | VDI Technology Center |