Fahrerassistenzsysteme für Flurförderzeuge
Flurförderzeuge kommen in der Intralogistik trotz steigender Automatisierung nach wie vor in großen Stückzahlen zum Einsatz. In vielen Bereichen werden Stückgüter auf standardisierten Ladehilfsmitteln als Ladeeinheiten in Palettenregalen eingelagert. Die Ein- und Auslagerung von Waren in manuell bedienten Palettenregalen erfolgt mit Gegengewichts- oder Schubmaststaplern. Der Fahrer übernimmt sowohl die Längs- und Querführung des Flurförderzeugs, als auch die Steuerung der Hubeinrichtung.
Unerfahrenen Fahrern von Flurförderzeugen fehlt die notwendige Routine bei dem Positionieren der Gabelzinken vor dem meistverbreiteten Ladehilfsmittel: der Europalette. Die begrenzten Platzverhältnisse im Arbeitsgang eines Lagers und die gewöhnungsbedürftige Hinterradlenkung führen zu zeitaufwendigen Korrekturen – die Umschlagsleistung sink
Neben den zeitlichen Verlusten bei der Palettenaufnahme, kann auch die Sicherheit bei diesem Vorgang gefährdet werden: Zu schnelles und unachtsames Manövrieren führt zu unerwünschten Kollisionen zwischen dem Flurförderzeug und der Umgebung. Die Gabelzinken beschädigen dabei ggf. die Europalette, die Ware oder das Palettenregal. Letzteres kann die Tragfähigkeit der Regalelemente erheblich verringern und zu Instabilität führen.
Für die beschriebene Ausgangslage soll ein System entwickelt werden, das den Fahrer von Flurförderzeugen bei der Aufnahme einer Europalette, als m verbreitetes LHM, unterstützt. Das angestrebte Forschungsergebnis umfasst einen Demonstrator, der die technische Machbarkeit zeigt und gleichzeitig als Grundlage für eine Evaluation dient. Die Evaluation soll zeigen, dass ein Fahrerassistenzsystem die Bedienung von Flurförderzeugen effizienter und sicherer macht. Ein Assistenzsystem mit der geforderten Funktionalität untergliedert sich in folgende Teilsysteme: Objekterkennung, Lokalisierung, Bahnplanung, Mensch-Maschine-Schnittstelle und Fahrzeugansteuerung.
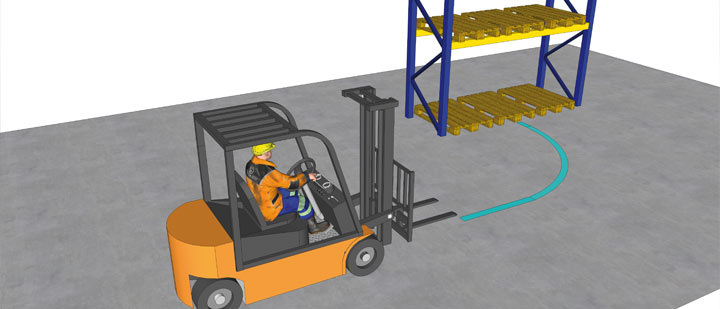
Ausgehend von einer Objekterkennung soll der Fahrer die gewünschte Zielpalette über eine Benutzerschnittstelle auswählen können. Die Objekterkennung, bestehend aus Sensorik und Bildverarbeitung, muss die Palette vor dem Fahrzeug erkennen und lokalisieren. Unter Berücksichtigung der relativen Position und der Fahrzeuggeometrie wird die optimale Trajektorie zur Einfahrt der Gabelzinken in der Einfahröffnungen der Palette berechnet. Der Fahrer betätigt anschließend nur noch das Fahrpedal. Das Fahrerassistenzsystem stellt den Lenkwinkel in Abhängigkeit der Fahrzeuggeschwindigkeit so ein, dass die berechnete Trajektorie abgefahren wird.
Ausgehend von einer Marktanalyse und den Funktionen der Teilsysteme des neuen Fahrerassistenzsystems wird eine Anforderungsliste und ein Konzept erstellt. Das Erkennen und Lokalisieren der Palette wird mit einer 3D time-of-flight Kamera realisiert. Die Erkennung der Palette erfolgt in der 3D Punktewolke, welche von der Kamera als Messwert geliefert wird. Nach der Erkennung von einer oder mehreren Paletten im Sichtbereich der Kamera erfolgt basierend auf den Tiefeninformationen die Berechnung der relativen Pose zwischen Kamera und Palette. Aus der Pose und der Fahrzeuggeometrie wird eine optimale Trajektorie für die Einfahrt der Gabelzinken in die Einfahröffnungen berechnet. Der Fahrer muss für die Auswahl der aufzunehmenden Palette mit dem Assistenzsystem interagieren. Im Fokus steht hierbei die Mensch-Maschine-Schnittstelle, welche die Hardware für die Visualisierung und die Eingabemöglichkeiten umfasst.
Für den Aufbau eines Demonstrators werden für die Teilautomatisierung von Fahrzeugfunktionen die technischen Realisierungsmöglichkeiten am Versuchsträger untersucht. Abschließend werden in einer Evaluation mit Probanden objektive und subjektive Kriterien erfasst und ausgewertet.
Das Forschungsvorhaben Fahrerassistenzsysteme für Flurförderzeuge wird von der Dr. Friedrich Jungheinrich-Stiftung gefördert.