EPoSysKo
Entwicklung und Potentialanalyse eines Systemkoordinators für den typübergreifenden Einsatz von Flurförderzeugen
Fahrerlose Transportsysteme (FTS) bilden eine flexible Möglichkeit, den innerbetrieblichen Materialfluss zu automatisieren. Die stetig zunehmenden Varianten von Fahrerlosen Transportfahrzeugen (FTF) führen dazu, dass vermehrt verschiedenartige FTF parallel in einem Materialflusssystem eingesetzt werden.
Gerade bei kleinen und mittleren Unternehmen (KMU) kann dabei nicht immer auf maßgeschneiderte Gesamtlösungen mit einheitlicher Steuerungssoftware zurückgegriffen werden. Stattdessen werden FTF von verschiedenen Herstellern bezogen, wobei jeder Hersteller eine spezifische Leitsteuerung für seine Fahrzeuge bereitstellt. Zwischen diesen Steuerungen ist ein Informationsaustausch meist nicht möglich, weshalb ein großes Potential zur Prozessoptimierung brachliegt.
In diesem Projekt wird eine koordinative Steuerung entwickelt, die den Austausch von Informationen zwischen mehreren FTS zum Zwecke der Effizienzsteigerung ermöglicht. Im Gegensatz zu einer zentralen oder dezentralen Steuerungsarchitektur wird so das in den Leitsteuerungen verwirklichte Know-How der FTF-Hersteller berücksichtigt.
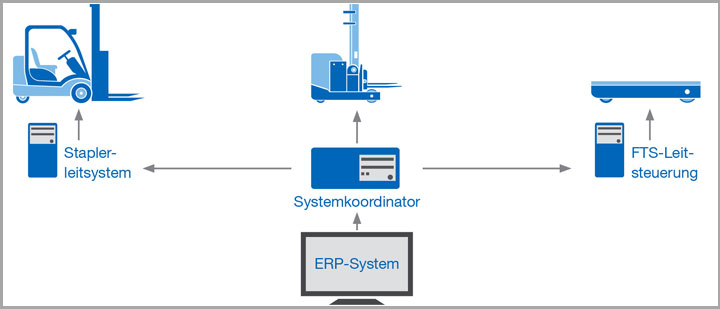
Neben der Integration verschiedener FTS-Leitsteuerungen soll auch die Einbindung einzelner Fahrzeuge ohne Leitsteuerung sowie von Leitsteuerungen manuell bedienter Flurförderzeuge (FFZ) ermöglicht werden. In Abbildung 1 (siehe oben) ist der Systemkoordinator mit den Schnittstellen zu verschiedenen FFZ und zum ERP-System, welches Transportaufträge erzeugt, dargestellt.
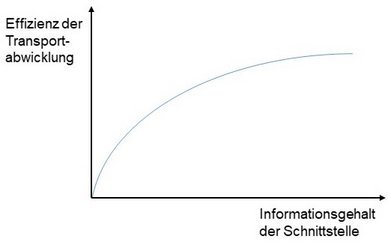
Je mehr Informationen aus den Leitsteuerungen dem Systemkoordinator zur Verfügung gestellt werden, desto effizienter lässt sich die Transportabwicklung gestalten (siehe Abbildung 2). Es wird vermutet, dass die Effizienz der Transportabwicklung bei zunehmend starker Schnittstellenausprägung stagniert. Deshalb liegt der Fokus dieses Forschungsvorhabens auf der Untersuchung der Auswirkungen von Schnittstellengestaltung und Wahl der Optimierungsmethoden auf die Transporteffizienz des Gesamtsystems.
Arbeitspakete 1 und 2: Um die genannten Ziele zu erreichen, wird zuerst eine Recherche zu den Schnittstellen bestehender FTS-Leitsteuerungen durchgeführt. Darauf basierend wird eine Klassifikation erstellt, nach der solche Schnittstellen unterteilt werden können. Anschließend wird der Stand der Technik von Ansätzen zur Optimierung von Transportvorgängen ermittelt. Ein Augenmerk liegt dabei auf den Informationen, die von den Algorithmen als Eingangsgrößen benötigt werden.
Arbeitspaket 3: Es wird ein Systemkoordinator entwickelt und formal beschrieben, der anhand der ihm zur Verfügung stehenden Informationen auf die angeschlossenen Systeme einwirkt, um die innerbetrieblichen Transportprozesse zu optimieren.
Arbeitspaket 4: Nun wird eine Simulationsumgebung aufgebaut, in der der neu entwickelte Systemkoordinator mit verschiedenen Optimierungsstrategien getestet werden kann. Zum Vergleich der Leistungsfähigkeit sollen auch herkömmliche Leitsteuerungen modelliert werden.
Arbeitspakete 5 und 6: Mithilfe der Simulation werden die Optimierungspotentiale verschiedener Schnittstellenausprägungen ermittelt. Darauf aufbauend werden schließlich Handlungsempfehlungen für Hersteller und Anwender von FTS formuliert.
- Brose Fahrzeugteile GmbH & Co. KG
- E&K Automation GmbH
- Jungheinrich Degernpoint AG & Co. KG
- Kuka Deutschland GmbH
- ME Industries GmbH
- Schiller Automatisierungstechnik GmbH
Dieses Forschungsprojekt wird unter dem Kennzeichen 20918 N im Auftrag der Forschungsgemeinschaft Bundesvereinigung Logistik e.V. (BVL) durchgeführt und aus Mitteln des Bundesministeriums für Wirtschaft und Klimaschutz über die Arbeitsgemeinschaft industrieller Forschungsvereinigungen "Otto von Guericke" e.V. (AiF) gefördert.