Abteilung Werkzeugmaschinen
Die Hauptaufgabe der Abteilung ist die interdisziplinäre Entwicklung, Konstruktion und Optimierung von Werkzeugmaschinen sowie die Umsetzung einer dafür geeigneten methodischen Vorgehensweise. Ein Schwerpunkt liegt dabei in der Untersuchung und der Optimierung des dynamischen Verhaltens von Maschinenstrukturen. Hierzu werden Verfahren zur Simulation und zur experimentellen Analyse des Strukturverhaltens, der Regelung und der Zerspanprozesse von Werkzeugmaschinen eingesetzt. Des Weiteren werden Werkzeuge und Vorgehensweisen zur Entwicklung von Steuerungssoftware erarbeitet. Der Regelungsentwurf komplexer Systeme bildet eine wichtige Grundlage für die Entwicklung und Umsetzung von integrierten adaptiven Strukturen und Regelungsverfahren zur Verbesserung der dynamischen Maschineneigenschaften.
Leitung der Abteilung: Martina Elisabeth Sigl
Die Forschungskompetenzen
- Digitaler Zwilling für die Werkzeugmaschine
Der Schwerpunkt des Forschungsfelds liegt in der Untersuchung und Automatisierung des gesamten Entwicklungsprozesses von Digitalen Zwillingen für Werkzeugmaschinen (Maschinenzwilling und Prozesszwilling). Dies beginnt mit der systematischen Datenakquise und endet mit der automatischen Entscheidungsfindung durch den Einsatz von KI-Modellen.
Forschungsfeldleitung: Daniel Piendl - Prozessverhalten
Im Forschungsfeld Prozessverhalten werden aktuelle Herausforderungen in der Zerspanung von metallischen Werkstoffen adressiert. Hierbei stehen insbesondere hybride Prozessketten im Fokus, bei denen ein nachgelagerter Fräsprozess die Bauteilqualität erhöht. Es werden Lösungen für die spanende Nachbearbeitung von additiv gefertigten Bauteilen (z. B. zum Remanufacturing) als auch die spanende Nachbearbeitung von schwer umformbaren Bauteilen erarbeitet.
Forschungsfeldleitung: Moritz Göldner - Reibschweißen
Die Schwerpunkte in diesem Forschungsfeld liegen in der Qualifizierung neuer Methoden zur Prozessüberwachung und -optimierung beim Rührreibschweißen durch den Einsatz von künstlicher Intelligenz. Darüber hinaus werden Ansätze zur Erschließung neuer Anwendungen des Verfahrens im Bereich des Leichtbaus und der Mobilität (z. B. Flüssigwasserstoffbehälter, Batteriekontaktierung, Raketenfertigung).
Forschungsfeldleitung: Amanda Zens
Erfahren Sie hier mehr zu aktuellen Projekten.
Ausstattung im Bereich Werkzeugmaschinen
Fräsbearbeitungszentrum GROB G352T
- Fräs-Spindel
- Drehzahlen bis zu 16.000 1/min, Tischgröße von 570 mm, Tischbeladung von max. 350 kg, Arbeitsraum: 600 x 855 x 750 mm³
- Sensorik: ToolScope-System zur Werkzeugüberwachung, Spike-InSpindle-System zur Aufzeichnung von Axialkräften und Biegemomenten, Werkzeugkamera für Schneidenbilder, Siemens-Edge-Gerät zur Aufzeichnung von Maschinendaten mit einer Abtastrate von 0,5 kHz, OPC-UA-Schnittstelle
- Verwendung: 5-Achs-Simultanfräsen von Bauteilen
- Aktuelles Forschungsprojekt (Stand: 2025): QuSAM, EREP, MINERVA, CICAM, MoVer

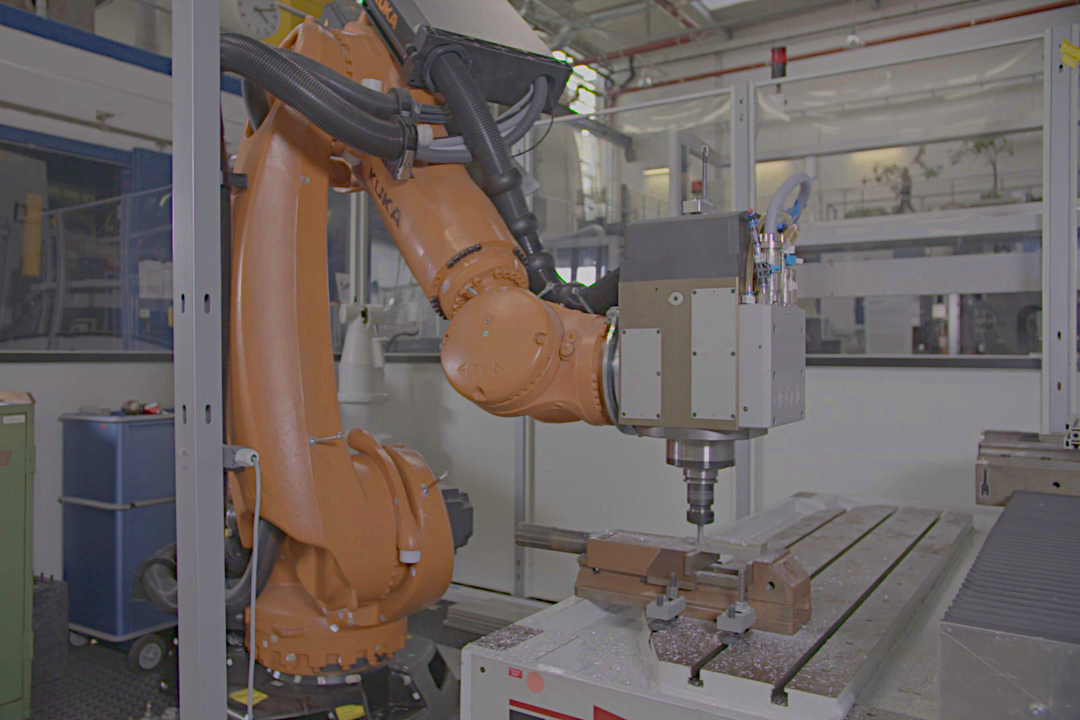
Schwerlast-Industrieroboter KUKA KR 240-R2500 prime
- Fräs-Spindel
- Drehzahlen bis zu 10.000 1/min und Traglasten von bis zu 240 kg
- Sensorik: Motion-Tracking-System und Lasertracker Leica LT150
- Steuerungs-/Regelungsmodi: Schnittstelle für eine externe Positionsregelung
- Verwendung: Fräsen und Bohren von Metallen oder Kunststoffen, Entwicklung von Methoden zur Steifigketisbestimmung, Offline-Kompensation durch Zerspankraftmodelle und Informationsfusion zur Modellierung des dynamischen Verhaltens
- Aktuelles Forschungsprojekt (Stand: 2025): ProKIRo
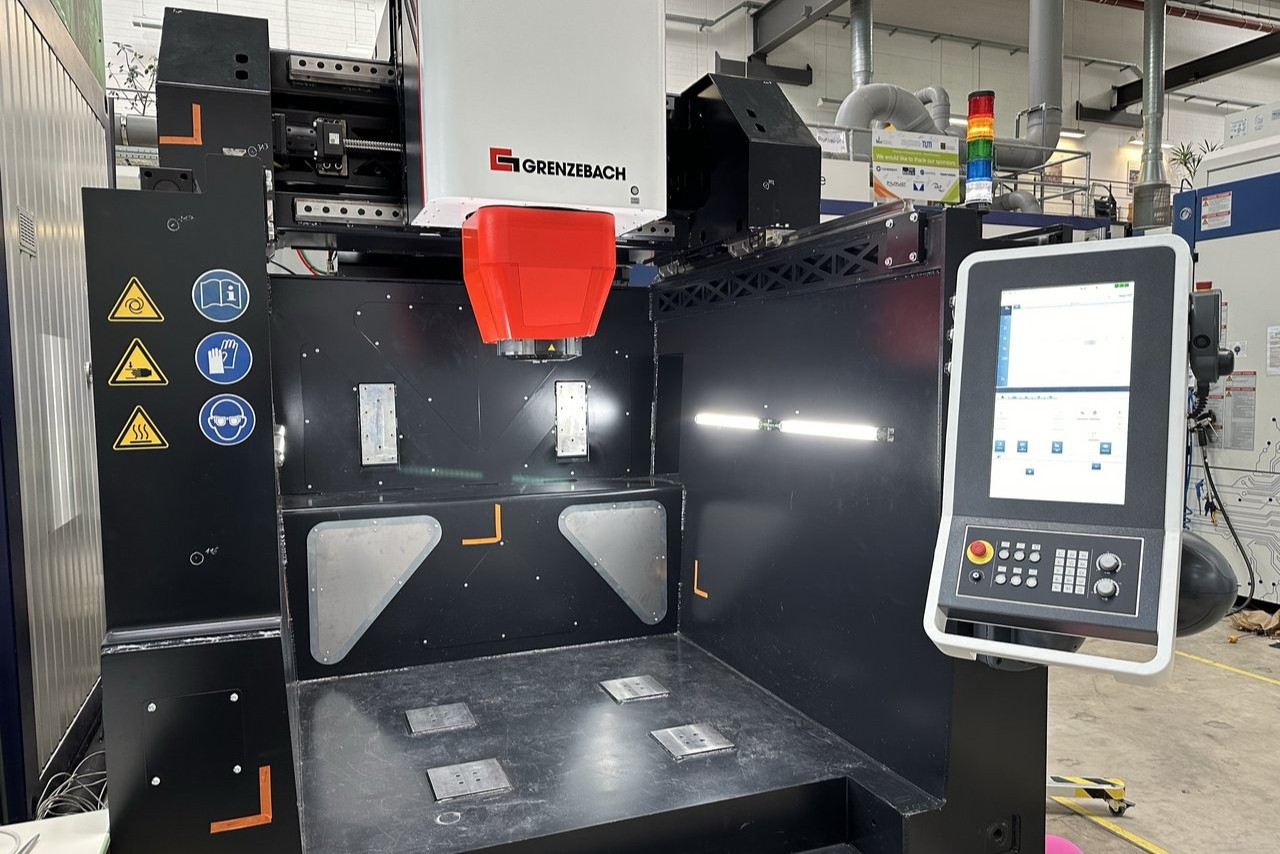
Grenzebach DSM 7-5
- Rührreibschweiß-Spindel
- Verfahrgeschwindigkeiten bis zu 20 m/min, Anpresskräfte bis zu 8 kN, Radialkräfte bis zu 2,6 kN, Arbeitsraum: 700 x 500 x 400 mm³
- Steuerungsplattform Bosch Rexroth ctrlX Core, OPC-UA-Schnittstelle
- Steuerungs-/Regelungsmodi: interne Kraftregelung
- Verwendung: Verschleiß von Werkzeugmaschinenkomponenten
- Aktuelles Forschungsprojekt (Stand: 2025): KIDZ
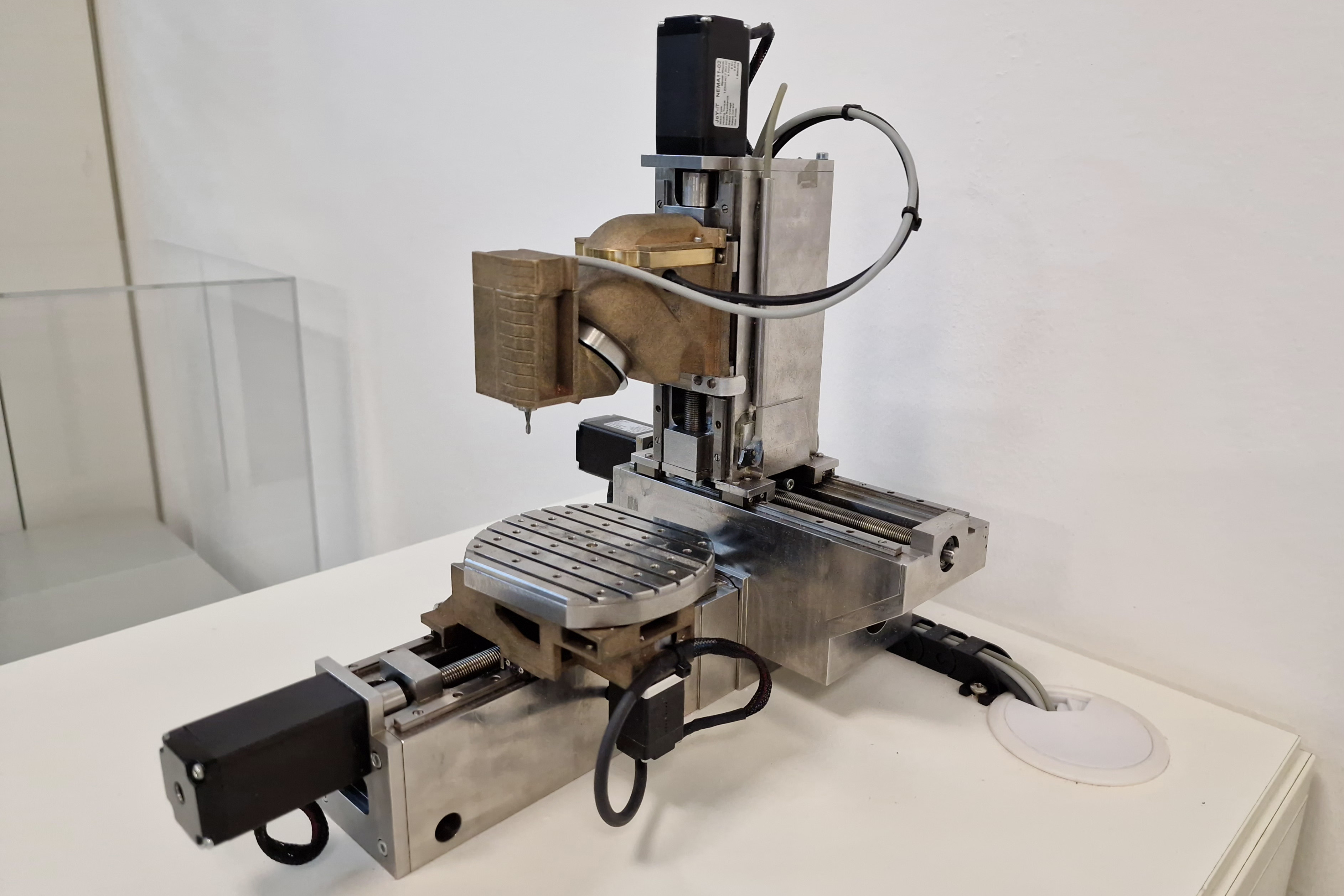
Miniatur-Werkzeugmaschine (Eigenbau)
- Fräs-Spindel
- Nachbau einer DMG DMU 80 P
- Verfahrgeschwindigkeiten bis zu 600 mm/min, Arbeitsraum: 70 x 70 x 35 mm³
- Bedienung: Raspberry Pi 4 Model B mit Touchdisplay und Software „Universal G-Code Sender“, Ansteuerung der Servomotoren: Arduino Mega mit Ramps 1.4 Board
- Verwendung: Vorführungen in Lehrveranstaltungen und sonstige Demonstrationszwecke
Schwerlast-Industrieroboter KUKA KR 500-2 MT
- Rührreibschweiß-Spindel
- Drehzahlen bis zu 2.500 1/min, Anpresskräfte bis zu 10 kN
- Sensorik: 3D-Profilsensor, interne Kraftsensoren, Inhouse-entwickeltes Temperaturmessgerät
- Steuerungs-/Regelungsmodi: interne Kraftregelung und Inhouse-Temperaturregelung
- Verwendung: Rührreibschweißen von 3D-Geometrien
- Aktuelles Forschungsprojekt (Stand: 2025): EffHycient

Bearbeitungszentrum Gebr. Heller Maschinenfabrik MCH 250
- Rühreibschweiß-Spindel
- Drehzahlen bis zu 6.000 U/min, Anpresskräfte bis zu 17,5 kN, Tischgröße bis zu 630 x 630 mm²
- Steuerung: Siemens Sinumerik 840D
- Steuerungs-/Regelungsmodi: Positionsregelung, Inhouse-Kraftregelung und Inhouse-Temperaturregelung
- Sensorik: sensorischer Werkzeughalter SPIKE mobile (pro-micron), Inhouse-entwickeltes Dynamometer, Inhouse-entwickeltes Temperaturmessgerät, Oberflächen-Laserscansystem RobiScan (Automation W+R GmbH), lichtoptisches Aufnahmesystem
- Verwendung: Rührreibschweißen, Rührreibpunktschweißen, Mikro-Rührreibpunktschweißen
- Aktuelles Forschungsprojekt (Stand: 2025): µKoBatt
