BIOGRAPHY
Ilja T. Feldstein was a member of the scientific staff at the Chair of Ergonomics December 2012 to November 2016.
After high school, he decided to enroll in engineering studies with an international orientation. He studied Mechanical Engineering at the Karlsruhe Institute of Technology in Germany, Engineering Sciences at the Arts et Métiers in France, and Medical Engineering at the ETH Zurich in Switzerland. Subsequently, he enrolled in a Ph.D. program at the Technical University of Munich in Germany. Additionally, in parallel to high school, he studied Mathematics at the University of Heidelberg, and in parallel to his undergraduate studies, Law at the KIT Center of Applied Jurisprudence (lectures by honorary professors of the University of Freiburg). In parallel to his graduate studies, he enrolled in classes in Medicine as well as Law at the Harvard Medical School and the Harvard Law School, respectively.
For his "outstanding academic and intercultural performances during his studies," he was announced laureate of the annual Excellence Award 2013, awarded by the DFH, a public institution funded by the German and French governments. During his academic career, he was recipient of multiple scholarships (amongst others Fulbright, Studienstiftung des deutschen Volkes, DAAD, DFH, BHFZ, and ERASMUS).
His research at the Chair of Ergonomics and at the Professorship of Sports Equipment and Materials dealt with virtual reality, automotive engineering, sports equipment engineering, and anthropometry.
During his time at the chair, he developed and maintained scientific cooperations with the Institut Français des Sciences et Technologies des Transports, de l'Aménagement et des Reseaux in France, the Beijing Institut of Technology in China, the Université de Québec en Outaouais in Canada, the Harvard Medical School in the United States, and the Ben-Gurion University of the Negev in Israel.
Since November 2016, he is a research fellow at the Schepens Eye Research Institute at the Harvard Medical School. Additionally, since April 2015, he holds a teaching assignment at the School of Design of the Pforzheim University of Applied Sciences, teaching the subject Automotive Ergonomics.
PUBLICATIONS
Print:
Feldstein, I. T., Kölsch, F. M., & Konrad, R. (2020). Egocentric distance perception: A comparative study investigating differences between real and virtual environments. In Perception [in press]
Feldstein, I. T., & Ellis, S. R. (2020). A simple, video-based technique for measuring latency in virtual reality or teleoperation. In IEEE Transactions on Visualization and Computer Graphics [in press].
Feldstein, I. T., & Peli, E. (2020). Pedestrians accept shorter distances to light vehicles as compared to dark ones when crossing the street. In Perception [in press].
Feldstein, I. T., & Dyszak, G. N. (2020). Road crossing decisions in real and virtual environments: A comparative study on simulator validity. In Accident Analysis & Prevention, 137, art. 105356.
Feldstein, I. T. (2019). Impending collision judgment from an egocentric perspective in real and virtual environments: A review. In Perception, 48(9), 769–795.
Lehsing, C., Ruch, F., Kölsch, F. M., Dyszak, G. N., Haag, C., Feldstein, I. T., Savage, S. W., & Bowers, A. R. (2019). Effects of simulated mild vision loss on gaze, driving and interaction behaviors in pedestrian crossing situations. In Accident Analysis & Prevention, 125, 138–151.
Feldstein, I. T., Lehsing, C., Dietrich, A., & Bengler, K. (2018). Pedestrian simulators for traffic research: State of the art and future of a motion lab. In International Journal of Human Factors Modelling and Simulations, 6(4), 250–265.
Lehsing, C., & Feldstein, I. T. (2018). Urban interaction – Getting vulnerable road users into driving simulation. In K. Bengler, J. Drüke, S. Hoffmann, D. Manstetten, & A. Neukum (Eds.), UR:BAN Human factors in traffic (pp. 347–362). Wiesbaden, Germany: Springer Vieweg.
Feldstein, I. T., & Bengler K. (2016). Validation aspects of virtual reality simulators for traffic research. In Proceedings of the Driving Simulation Conference Europe 2016 (DSC '16), Paris, France.
Feldstein, I. T., Dietrich, A., Milinkovic, S., & Bengler, K. (2016). A pedestrian simulator for urban crossing scenarios. In IFAC-PapersOnLine, 49(19), 239–244.
Feldstein, I. T., Lehsing, C., Dietrich, A., & Bengler, K. (2016). Pedestrian simulators for traffic research: State of the art and future of a motion lab. In Proceedings of the 4th International Digital Human Modeling Symposium (art. 9), Montréal, QC, Canada.
Feldstein, I. T., Güntner, A., & Bengler, K. (2015). Infrared-based in-vehicle head tracking: A prototype for tracking drivers' head movements in real time. In Procedia Manufacturing, 3, 829–836.
Dietrich, A., & Feldstein, I. T. (2015). Ein neues Mitglied am Lehrstuhl: Sitztestdummy Bob. In Ergonomie aktuell, 16, 27–29.
Lehsing, C., Feldstein, I. T., & Dietrich A. (2015). Fußgängersimulation am Lehrstuhl für Ergonomie – Bits und Bytes lernen laufen. In Ergonomie aktuell, 16, 16–21.
Feldstein, I. T. (2014). Rennschlitten: Konkurrenzfähig bleiben durch technischen Vorsprung. In chemie&more, 5(6), 32–33.
Feldstein, I. T. (2014). Optimierung eines Skeletonschlittens. In Ergonomie aktuell, 15, 36–38.
Senner, V., Feldstein, I. T., & Kronsteiner, T. (2013). Optimierung eines Skeletonschlittens. In Ergonomie aktuell, 14, 52–54.
Feldstein, I. T. (2012). A new design for a dynamic walking surface for rehabilitation therapies of mobility-impaired stroke patients [Master's thesis]. Zurich, Switzerland: Department of Health Sciences and Technology, ETH Zürich.
Posters:
Feldstein, I. T. (2016). Virtual reality simulators for traffic research: Concept and validation aspects. At Driving Simulation Conference Europe 2016 (DSC '16), Paris, France.
Feldstein, I. T. (2016). Entwicklung eines Fußgängersimulators für Untersuchungen von Verkehrsszenarien. At 53rd TUM Graduate School's Kick-Off Seminar, Freising, Germany.
Lehsing, C., Benz, T., Feldstein, I. T., & Bengler, K. (2014). Effects of human-human interaction in urban scenarios using a multiple simulator environment. At Human Factors and Ergonomics Society Europe Chapter 2014 Annual Conference, Lisbon, Portugal.
Feldstein, I. T., Bacara, D., Hainfellner, M., & Bengler, K. (2014). IR-based in-vehicle head-tracking. At Human Factors and Ergonomics Society Europe Chapter 2014 Annual Conference, Lisbon, Portugal.
Lehsing, C., Benz, T., Feldstein, I.T., & Bengler, K. (2014). Do human driver notice the difference — A multi-simulator study with car and pedestrian simulator. At Driving Simulation Conference Europe 2014 (DSC '14), Paris, France.
Feldstein, I. T. (2013). Développement et construction d’un simulateur piéton. At Les Doctoriales 2013 de l'Ecole Polytechnique et de ParisTech, Dammarie-les-Lys, France.
Talks:
Feldstein, I. T. (August 9th, 2017). Investigation of pedestrian behavior in virtual reality. At Vision and Visual Optics (VIVO) Seminar Series, Harvard Medical School, Boston, MA, United States.
Feldstein, I. T. (July 25th, 2017). Virtual reality as a tool for pedestrian investigation. At Sinha Laboratory for Vision Research Seminar Series, Massachusetts Institute of Technology, Cambridge, MA, United States.
Feldstein, I. T. (August 31st, 2016). A pedestrian simulator for urban crossing scenarios. At 13th IFAC/IFIP/IFORS/IEA Symposium on Analysis, Design, and Evaluation of Human-Machine Systems, Kyoto, Japan.
Feldstein, I. T. (June 29th, 2016). Methods for pedestrian behavior investigation: An overview. At 2nd Workshop on Driver Cognitive Assistance and Highly Automated Vehicles, Beijing, China.
Feldstein, I. T. (June 16th, 2016). Pedestrian simulators for traffic research. At 4th International Digital Human Modeling Symposium, Montréal, QC, Canada.
Feldstein, I. T. (speaker), & Hölzel, C. (author) (June 16th, 2016). Development and evaluation of an individually adjusted assembly aid. At 4th International Digital Human Modeling Symposium, Montréal, QC, Canada.
Feldstein, I. T. (speaker), & Knott, V. (author) (June 15th, 2016). Ergonomic user-interface of an exoskeleton for manual handling tasks — An evaluation study. At 4th International Digital Human Modeling Symposium, Montréal, QC, Canada.
Feldstein, I. T. (February 18th, 2016). Realisierung eines Fußgänger-Simulators für urbane Querungsszenarien. At UR:BAN Konferenz 2016, Garching, Germany.
Feldstein, I. T. (July 28th, 2015). IR-based in-vehicle head tracking. At 6th International Conference on Applied Human Factors and Ergonomics 2015, Las Vegas, NV, United States.
Feldstein, I. T. (October 8th, 2014). Driving simulator study evaluating the distraction caused by projections on the windshield. At Human Factors and Ergonomics Society Europe Chapter 2014 Annual Conference, Lisbon, Portugal.
SUPERVISED THESES
2018:
- Human Motion Patterns in Virtual Environments: Robust Data Mining and Advanced Correlation Analysis (Aliakbar Ahmadi, Master's Thesis)
- Developing a Unity-Based Driving Simulator Setup for Investigating Change Blindness (Benjamin Orthen, Bachelor's Thesis)
- Detection and Tracking of Medical Instruments in Minimally Invasive Procedures Using Galvanomagnetic Effects (Kenneth Okoh, Bachelor's Thesis)
- Evaluation of Immersion and Presence in Virtual Reality Systems (Georg Dyszak, Term Project)
2017:
- Development and Design of a Cost-Effective Skeleton Sled for Young Athletes (Philippo Rabast, Term Project)
- Inferential Statistical Assessment of Human Kinetic Behavior and Perception in Virtual Environments (Aliakbar Ahmadi, Term Project)
- Analysis of Urban Driving Behavior in Different Simulator Configuration (Christian Haag, Bachelor's Thesis)
2016:
- Interface Creation in Between a Sound Engine and a Virtual Environment (Nikolaos Tsiamitros, Term Project)
- Human Performance in Virtual Road Crossing Scenarios (Carmen Hammel, Bachelor's Thesis)
- Optimization of a Skeleton Sled for the 2018 Winter Olympics: The Head Bearing (Lena Gruber, Term Project)
- Optimization of a Skeleton Sled for the 2018 Winter Olympics: The Construction Frame (Philippo Rabast, Bachelor's Thesis)
- Discretization of User Inputs to Increase the Performance of an Optimization Software (Julian Färber, Term Project)
- Comparison of the Perception of Local Radial Motion in Virtuality and Reality (Georg Dyszak, Bachelor's Thesis)
- Comparison of the Egocentric Distance Perception in Virtuality and Reality (Felix Kölsch, Bachelor's Thesis)
- Evaluation of Methods and Construction of a Measuring System for the Data Acquisition of Vehicle Dynamics (Johannes Reng, Bachelor's Thesis)
- Measurment of Latency in Virtual Reality (Florian Hänel, Bachelor's Thesis)
- CAD and Texture Mapping for the 3D Modeling of Complex Objects in Virtual Reality (Tizian Unkauf, Bachelor's Thesis)
- Visual and Acoustic Information Transfer in the Virtual Reality on the Example of a Boundary Warning System (Luis Kalb, Term Project)
- Haptic Information Transfer in the Virtual Reality on the Example of a Boundary Warning System (Beate Wolff, Term Project)
- Software Architecture and User Interface Development for Numerical Optimizations (Christian Lichtmannegger, Term Project)
- Evaluation of Multimodal Warning Concepts in Virtual Reality (Sasha Milinkovic, Master's Thesis)
- Development and Validation of a Real-Time 3D Data Fusion for a Motion Capture System Using Multiple Kinect Sensors (Martin Roesch, Master's Thesis)
- Experimental Investigation of Human Kinetic Behavior in Virtual Reality (Johannes Hachmann, Term Project)
- Integration of a Marker-Less Real-Time Motion Capture System into a Simulation Software (Amine Ben Arab, Bachelor's Thesis)
- Investigation of the Just Noticeable Difference Regarding the Speed Perception Using a Head-Mounted Display (Eda Aydemir, Bachelor's Thesis)
- Development of a Wireless LED Marker for Optical Motion Capture Systems (Oliver Metzler, Term Project)
- Elaboration of a Sound Library for Driving and Pedestrian Simulators (Alexander Depser, Bachelor's Thesis)
- Numerical Optimization of Positioning Settings for Optical Motion Capture Systems (Peter Gawronski, Term Project)
- Requirements Analysis, Conception, and Integration of a Kinect-Based Motion Capture System (Constantin Lehnhoff, Bachelor's Thesis)
- Benchmark on Motion Capture Systems (Christian Sandbichler, Term Project)
- 3D Object Modeling in the Simulation Environment of SILAB 4.0 (Sebastian Titze, Bachelor's Thesis)
2015:
- Virtual Sound Environment: Creation of Synthetic Car Sound (Tobias Wilczeck, Bachelor's Thesis)
- Human Performance in the Virtual Pedestrian Simulator (Oliver Zillig, Term Project)
- Pedestrian Simulator — Presence Evaluation and Validation (Sasha Milinkovic, Term Project)
- Conversion of Noise Vectors for a Pedestrian Simulator (Andreas Gerö, Term Project)
- Economic Consideration of an Energy Harvesting Approach for a Futsal Pitch (Georg Riedel, Master's Thesis)
- Development of a Motion-Capture-Suit with Active LED-Markers for Optical Motion-Capturing Systems Based on Infrared Light (David Dillmann, Master's Thesis)
- Driver Assistance Systems for Improving Visual Perception in a Poor Visibility Situation and Considering an Optimal Human-Machine-Interface (Benno Bernhardt, Term Project)
- Traction and Impact Measurement Regarding Outdoor Use of Sports Surfaces (Ernst Fischer, Bachelor's Thesis)
- Tracking of Walking Motion for a Pedestrian Simulator (Stefan Hönick, Term Project)
- Study of Several Futsal Floors with an Innovative Device: Traktester (Antonin Leroy, Bachelor's Thesis)
2014:
- Obstacle Detection and Tracking using a Stereo Night Vision System (Dominik Buchinger, Bachelor's Thesis)
- Proof of Concept of a Pedestrian Simulator (André Dietrich, Master's Thesis)
- 3D User Interfaces — Overview and Specific Application 'Pedestrian Simulator' (Volker Jeschke, Term Project)
- Optimization of a Skeleton Sled for the 2014 Winter Olympics: The Sled Covering (André Dietrich, Term Project)
- Driving Simulator Study to Distraction by Projections on the Windshield (Carmen Mayer, Bachelor's Thesis)
- Study Concerning the Distraction and Driving Behavior by Presenting Information on a Head-Up Display Compared to an 'Emissive Projection Display' (Stefan Demmelmair, Term Project)
2013:
- Development of a Head Tracking Method in Passenger Cars (Alexander Güntner, Master's Thesis)
- Optimization of a Skeleton Sled for the 2014 Winter Olympics: The Saddle (Thomas Kronsteiner, Term Project)
PROJECTS
Project UR:BAN | 2012–2016
[Urbaner Raum: Benutzergerechte Assistenzsysteme und Netzmanagement]
Thirty-one German partners involving automobile and electronics manufacturers, suppliers, communication technology, and software companies, as well as research institutes and cities, had joined in the cooperative project UR:BAN to develop advanced driver assistance and traffic management systems for cities. The focus was on the human element in all aspects of mobility and traffic. The research objectives were pursued in three main thematic target areas: Cognitive Assistance, Networked Traffic System, and Human Factors in Traffic.
More specifically, the thematic target area "Human Factors in Traffic" dealt with anticipatory and stress-free driving. Novel assistance functions provide the driver with supporting information in complex traffic situations, but benefits arise only if the information flow is intelligently filtered to avoid overloading the driver. To this end, support is adapted to the driver’s current state and activation by detection of overburdened or inattentive drivers. By incorporating adaptive support into the design of vehicle controls and displays, the driver receives information much earlier and is motivated to anticipate traffic situations rather than simply react to them. This anticipatory approach is the key to a safer, more efficient, and less taxing urban driving experience. Sub-projects involved Urban Driving, Human-Machine Interaction for Urban Environments, Behavior Prediction and Intention Detection, Simulation, and Controllability. [more...]
Project lead: Klaus Bengler
Project team members: André Dietrich, Armin Eichinger, Ilja Feldstein, Christian Lehsing
Project collaborators: Adam Opel AG, AUDI AG, BMW AG, BMW Forschung und Technik GmbH, Robert Bosch GmbH, Bundesanstalt für Straßenwesen, Continental Automotive GmbH, Continental Safety Engineering International GmbH, Continental Teves AG & Co. oHG, Daimler AG, Deutsches Zentrum für Luft- und Raumfahrt e.V., Fraunhofer IAO, GEVAS Software GmbH, Heusch Boesefeldt GmbH, HTW Saar, ifak Magdeburg e.V., Landeshauptstadt Düsseldorf, MAN Truck & Bus AG, PTV Group, RWTH Aachen, Stadt Kassel, TU Braunschweig, TU Chemnitz, TU München, TomTom Development Germany GmbH, TRANSVER GmbH, Universität der Bundeswehr München, Universität Duisburg-Essen, Universität Kassel, Universität Würzburg, Volkswagen AG

Project Pedestrian Simulator | 2013–2016
Driving simulators have been around for decades, supporting the investigation of driver behavior and validation of advanced driver assistance systems (ADAS). The development of pedestrian simulators, on the other hand, is still in its beginning stages. However, with increasing complexity of ADAS, it is not sufficient anymore to evaluate those uniquely from the perspective of a driver using driving simulators. Virtual reality (VR) systems that emerge the user into virtual environments, more specifically into that of a pedestrian, allow for the investigation of pedestrian behavior in a reproducible, safe, and cost-efficient way.
This project dealt with the development and validation of a newly designed pedestrian simulator that finally consisted of a software simulating a traffic environment, as well as a stereoscopic head-mounted display (HMD), stereo headphones with built-in active noise control (ANC), an optical motion-capture system, a one-size-fits-all motion-capture suit with infrared LED markers, and an actuated energy supply and data exchange routing.
Project lead: Ilja Feldstein
Project team members: Aliakbar Ahmadi, Eda Aydemir, Amine Ben Arab, Alexander Depser, André Dietrich, David Dillmann, Georg Dyszak, Johannes Hachmann, Stefan Hönick, Volker Jeschke, Luis Kalb, Felix Kölsch, Constantin Lehnhoff, Oliver Metzler, Sasha Milinkovic, Johannes Reng, Martin Roesch, Christian Sandbichler, Maximilian Schmidl, Sebastian Titze, Nikolaos Tsiamitros, Tizian Unkauf, Tobias Wilczeck, Beate Wolff, Oliver Zillig
Collaborators: Stéphane Bouchard (UQO), Viola Cavallo (IFSTTAR), Nguyen-Thong Dang (IFSTTAR), Robert Konrad (Stanford), Eli Peli (Harvard)

Project OBSTACLE | 2015–2017
[Optimization of Basic Settings for Tridimensional Areas: the Camera Location Evaluation]
The positioning and arrangement of motion-capture cameras for marker-based systems – such as Vicon – is a somewhat undefined procedure and requires some experience with the system. There are no precise instructions for the optimized placement despite vague recommendations to evenly distribute and orient the cameras around the tracking area of interest. A marker needs to be seen by at least two cameras so that the three-dimensional location can be calculated by triangulation. With an increasing number of cameras that simultaneously have a view on a marker, the chances of the marker not being detected decrease and, additionally, the precision of determined location increases since the cumulated visual resolution increases with each additional camera.
Within this project, a software application was developed that solves the camera placement mathematically. This application delivers a calculated recommendation for an optimized camera distribution and orientation based on the available laboratory space and available camera equipment. The software allows the user to define the laboratory floor plan, laboratory height, desired tracking height, and the parameters of available camera equipment. The software output will generate a recommendation for the camera placement and orientation, as well as a heat map of the laboratory surface that would be reliably trackable under given recommendations.
Project lead: Ilja Feldstein
Project team members: Julian Färber, Peter Gawronski, Christian Lichtmannegger

Project LatencyVR | 2016–2019
Designers of virtual-reality systems are aware of the need to minimize delays between the users’ tracked physical actions and the consequent displayed actions in the virtual environment. Such delays, also referred to as end-to-end latency, are known to degrade the user performance and even cause simulator sickness. Though a wide variety of hardware and software design strategies have been used to reduce delays, techniques for measuring and minimizing latency continue to be needed since transmission and switching delays are likely to continue to introduce new sources of latency, especially in wireless mobile environments.
This project dealt with the development of a convenient, low-cost technique for measuring end-to-end latencies using a human evaluator, a common cell phone camera or action camera, and a turntable. Since the technique does not depend upon the use of specialized hardware and software, it contrasts with other techniques in that it can easily be used to measure latencies of systems in the specific hardware and software configuration and the performance environments of interest.
Project lead: Ilja Feldstein
Project team members: Stephen R. Ellis (NASA), Florian Hänel

Project HeatVision | 2012–2015
Drivers experience difficulties detecting traffic participants, specifically smaller ones such as pedestrians, bicycles, and animals, under impoverished visual conditions, such as during rain, fog, or darkness.
The goal of this project was the development of a novel driver-assistance system to increase driving safety. The system uses an optical augmented reality approach: Localized warnings on the windshield will indicate to the driver when a vehicle, person, or animal are close to the vehicle's trajectory. For this, two thermal imaging cameras were installed behind the radiator grill, detecting obstacles that are warm relative to the environment, such as living beings or actively driving vehicles. The three-dimensional positions of possible obstacles were calculated through triangulation. Furthermore, the driver's head position was tracked with an in-vehicle camera, so that the information on the windshield could be presented in a contact-analog manner. A special challenge lied in creating the real-time interface, connecting the three subsystems "windshield projection," "environment tracking," and "head tracking."
Project lead: Ilja Feldstein
Project team members: Benno Bernhardt, Dominik Buchinger, Stefan Demmelmair, Alexander Güntner, Carmen Mayer, Gustavo Peláez
External project members: Daniel Bacara (Signum Bildtechnik), Frank Diermeyer (FTM), Martin Hainfellner (Signum Bildtechnik), Amin Hosseini (FTM), Georgica Iacobescu (Signum Bildtechnik),

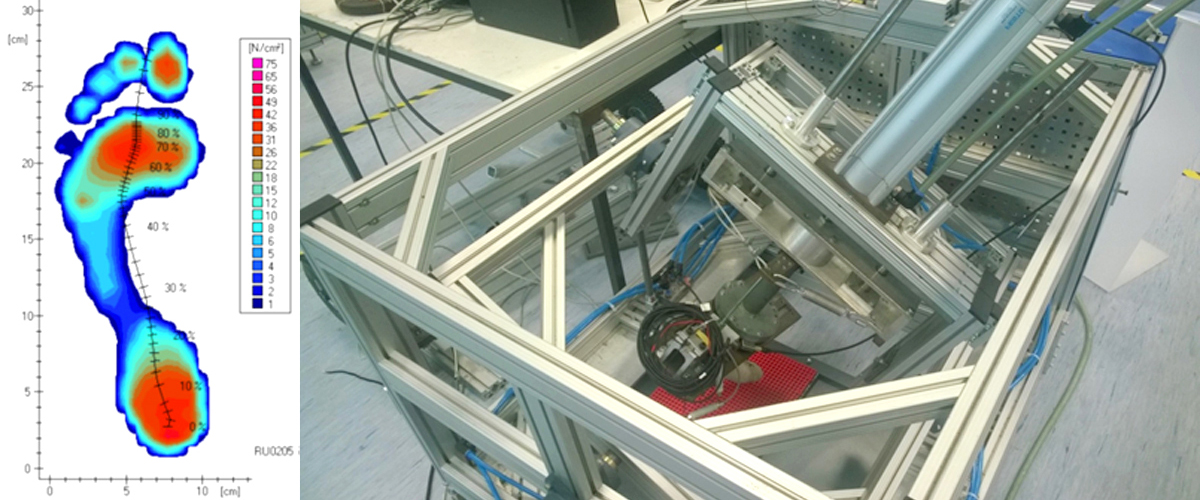
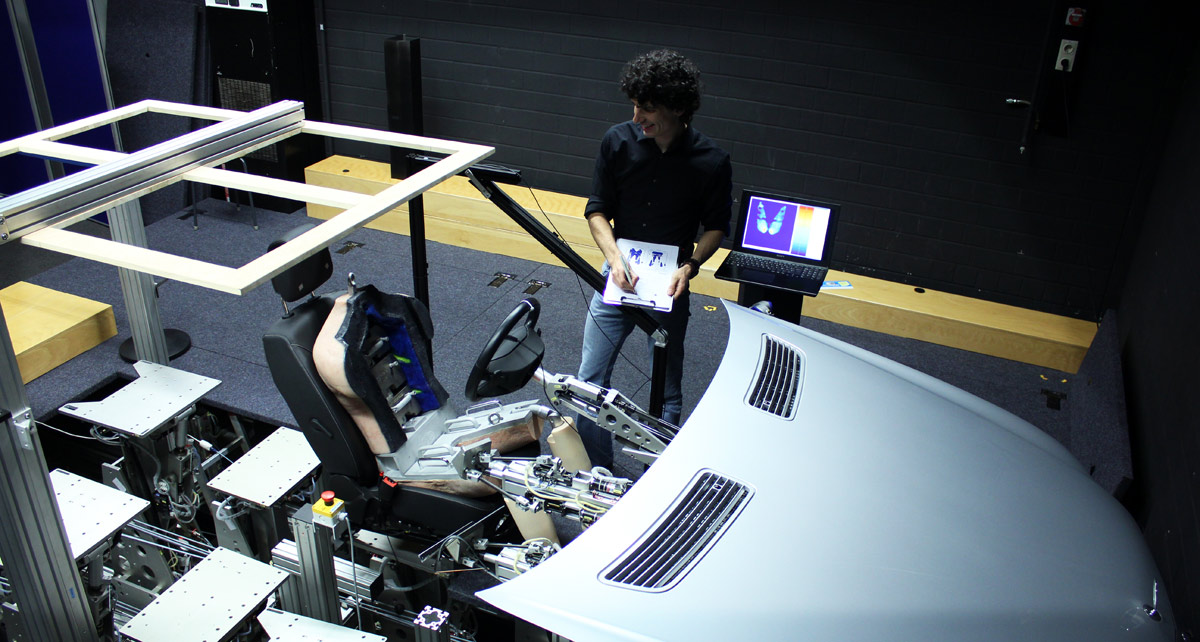
Project Dummy Bob | 2014–2015
Car seat designers require the possibility to test their seats in a standardized way and, more specifically compare different seats to each other. Classically, test persons will sit down on the seat so that the pressure distribution may measured using sensory mats. The difficulty herein lies that test persons may be subject to body shape variations over time that will complicate comparison of several measurements that have been taken over time. Additionally, it is not possible to ensure that the same test person will always be available.
For this reason, a test specimen was elaborated with the help of a make-up artist who was specialized in creating lifelike silicone props. The built dummy represents the typical European middle-aged man (50th percentile). The basic construction consists of water-jet cut and forged aluminum pieces that gives the dummy its stability. The elements emulating the bone structure inside are made of cast resin that relied on afore 3D-printed bone models. The bone structure was enclosed with different types of gradually cast silicones that imitate muscle, fat, and skin tissues. The dummy was created modular for mobility reasons since its full weight is 81.7 kg. The spine of the dummy was designed adjustable so that the back position could be changed according to the examiner's needs. The weight of the dummy and also the weight distribution is adjustable with custom-fit removable galvanized iron weights.
Project lead: Ilja Feldstein
Project team members: Sophie Bawin, André Dietrich, Hannes Frühschütz, Alexander Kolmikow (endeffect), Francisca Nothaft (SpGM), Kilian Rauner (SpGM)
Project MiniSIM | 2016–2018
Interaction is the process of behavior adaption between two or more participants. In traffic, interaction is primarily based on visual stimuli. Therefore, it is of little surprise that numerous driving-simulator studies in the past specifically investigated the driver’s gaze and visual attention. However, prior driving simulator studies have typically used preprogrammed pedestrians that did not interact with the human driver.
The project consisted of designing and building an adequate experimental setting that allows for traffic investigations with realistic interaction behavior. For this, a highly immersive driving simulator was created that was linked to a pedestrian control center. This control center allowed for individual manipulation of the virtually projected pedestrians through the investigator or an assistant. The driving simulator was designed using three monitors, steering wheel and pedals units, a car seat, and a modular frame structure connecting the elements. The three curved ultra-wide 2K monitors were semi-circularly arranged, enabling a 180° field of view. The steering wheel used a brushless servomotor with hall sensors on the motor and the axis. A belt drive mechanism provided the user with force feedback while driving, creating overall a realistic driving experience. The accelerator pedal was equipped with contactless and magnetic sensors, as well as a vibration motor indicating oversteer and rear-wheel spin. The base frame construction was easily adjustable, allowing for ergonomic adjustments so that different users had all the same view and accessibility to the control units. An eye tracker was integrated in the setup, allowing for gaze evaluation.
Project lead: Ilja Feldstein
Project team members: Alex Bowers (Harvard), Georg Dyszak, Christian Haag, Felix Kölsch, Christian Lehsing, Benjamin Orthen, Florian Ruch, Steven Savage (Harvard), Garrett Swan (Harvard)

Project OSIRIS | 2016–2019
[Ophthalmologic Study Investigating Road-User Interaction Scenarios]
The car, since its development in the late 19th century, is still one of the most important technical developments for humanity. It enables the individual human being to be part of society and travel from place to place, thus helping to maintain independence. Humans have to be mobile, and this individual mobility cumulates in traffic. People become traffic participants with all their abilities and disabilities, which likely affect the traffic system. One major aspect of traffic participation is the ability of drivers to sense, perceive, and interact safely with other road users. The exchange of non-verbal visual cues is an essential component of interactions between drivers and pedestrians. For example, hand gestures, body pose, walking/driving speed, and gaze/head direction are all visual cues that may be used to express intention in a potential driver-pedestrian encounter. Prior studies investigating interactions between normal-sighted drivers and pedestrians have mostly been conducted in on-road settings and have highlighted the importance of both visual cues and other situational factors in driver-pedestrian interactions.
In this project, it was investigated how a mild vision loss comprising reduced visual acuity and reduced contrast sensitivity affected the behavior adaption between a driver and a pedestrian in pedestrian-crossing situations with respect to gaze behaviors, driving safety (criticality) measures, and social interaction metrics. The simulator study used the interactive setting that was previously designed in the project MiniSIM, allowing the investigator or an assistant to manipulate the displayed pedestrian individually. Results indicated that mild vision impairment had little impact on interactions with pedestrians once they were detected and only had mild adverse consequences on driving safety. Time series measures were sensitive to differences in behavior adaption between road users depending on the level of interaction and type of crossing situation.
Project lead: Christian Lehsing
Project team members: Alex Bowers (Harvard), Georg Dyszak, Ilja Feldstein, Christian Haag, Felix Kölsch, Florian Ruch, Steven Savage Harvard), Garrett Swan (Harvard)

Project TRIAGE | 2017–2018
[Tracking Minimally Invasive Instruments Applying Galvanomagnetic Effects]
The field of minimally invasive medical procedures has experienced tremendous progress, with the number of such surgeries increasing exponentially. However, the need for tracking the instruments and determining their precise location inside the body remains a challenge for physicians, unless complex and unwieldy imaging procedures such as MRI, CT, or ultrasound are used.
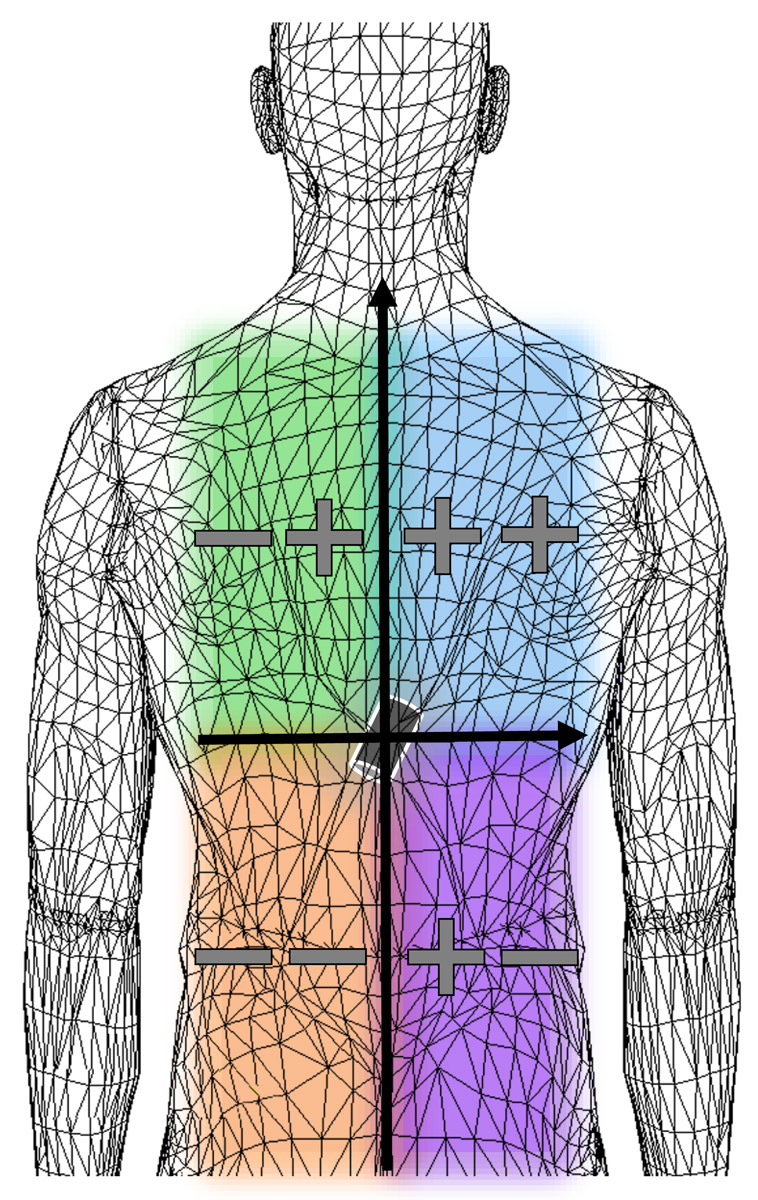
This project investigated possibilities of tracking minimally invasive instruments (such as catheters) through galvanomagnetic effects. Such effects can be created by magnetizing the instrument's ending. Magnetometers that can sense galvanomagnetic effects are widely available for example in smartphones or tablets. By scanning the body externally with such a magnetometer, the position of the magnetic ending could be localized relatively precisely. A user-friendly interface on a tablet could visualize the according location. The device requires to be hovered over the body surface to detect the switch from positive to negative charges that reveal the magnet's location relative to the perpendicular scanning direction. Additionally, motion sensors in the tablet can analyze the manual scanning movement that allows the target to be displayed in real time on the tablet's screen.
Medical teams may profit from such a tool when larger imaging tools are not available, such as in third-world countries due to costs or at rescue missions due to immobility of larger devices. Furthermore, magnetic radiation is physiologically safe, unlike, for example, X-ray radiation.
Project lead: Ilja Feldstein
Project team member: Kenneth Okoh
Project TUM for Gold | 2012–2018
In competitive high-performance sports such as at the Olympics, a fraction of a second may decide over a victory. The individual equipment in sports such as skeleton is crucial for the success of the athlete. For this reason, the effort was made to put up a team of engineers, physicists, aerodynamicists, practitioners, and athletes to design the perfect racing machine. First, for the athlete Anja Huber with the ultimate goal Winter Olympics 2014, and then, for Jacqueline Lölling with the ultimate goal Winter Olympics 2018.
The sled was meticulously designed with special attention given to the aerodynamics, weight distribution, materials, ergonomics, and frame design. The project required much creativity and to think outside the box: The regulations given out by the International Bobsleigh & Skeleton Federation had to be carefully studied, and solutions within given rules had to be found that eventually let the athletes and their sleds to be faster. Since the athletes descend at velocities of up to 150 km/h and not protected by much more than a helmet, the safety and reliability of the equipment remain top priorities.
The project was sponsored by Red Bull. The team effort led to multiple medals and victories in the Winter Olympics, World Cups, European Championships, as well as German championships.
Project lead: Ilja Feldstein
Project team members: André Dietrich (SpGM), Matthias Dondorf (Red Bull), Lena Gruber (SpGM), Anja Huber (BSD), Thomas Kronsteiner (SpGM), Jacqueline Lölling (BSD), Jürgen Mitternacht (SpGM), Christoph Niedermeier (FluiDyna), Philippo Rabast (SpGM), Wolfram Schweizer (BSD), Veit Senner (SpGM), Wolfram Volk (UTG), Annika Weinschenk (UTG), Hannes Weiss (UTG)

Project Futsal | 2014–2015
Futsal is a smaller version of football, highly popular in South America, but also enjoying increasing popularity in Europe. However, Futsal has also become one of the top ten injury-prone sports, having an incidence rate of 55.2 traumas per 10,000 hours of activity. This is specifically due to Futsal encountering many sprinting, stopping, cutting, directions-changing, and pivoting situations where shoe-surface traction must be within an optimal range.
This project dealt with the systematic investigation of different shoe-floor combinations, investigating the according friction and impact characteristics. For this, a device was used that allowed for precise repeatability of applied forces and directions while friction and impact were measured with sensors.
Additionally, the project analyzed energy harvesting potentials: In other words, the collection of the impact energy absorbed by the floor. This may be of interest in the case of mobile event floors, with the collected energy eventually powering necessary instruments and billboards, making the mobile event floor independent from the availability of external power supply.
Project lead: Bahador Keshvari (SpGM)
Project team members: Ilja Feldstein, Ernst Fischer (SpGM), Antonin Leroy (Hochschule München), Jürgen Mitternacht (SpGM), Georg Riedel (SpGM), Veit Senner (SpGM)