DFG PAK 404: Graduelle Automatisierung in der Chirurgie
Nach langen Vorarbeiten seit dem Jahr 2001 haben die Forscher der Universitätsklinik Leipzig und der Medizingerätetechnik der TU München einen gemeinsamen Forschungsantrag gestellt. Ziel ist es nach einem bestimmten wissenschaften Prinzip der graduellen Automation (Professor Dr. Dietrich Manzey, Berlin) keine starke Automatisierung sondern eine graduelle Automatisierung bestimmter chirurgischer Assistensfunktionen zu erreichen. Die Projekte laufen seit Anfang 2009.
Graduelle Automation in der Chirurgie | Seit dem Jahr 2001, als die CURAC mit dem Präsidenten Prof. Dr. F. Bootz, dem Geschäftsführer Dr. G. Strauß und dem Vorstandsmitglied Prof. Dr. T. Lüth (Sprecher des Paketantrags) gegründet wurde, arbeiten die Forschungsgruppen zusammen. In dem Paketantrag PAK 404 soll nicht versucht werden eine volle Automatisierung von chirurgischen Vorgängen zu erreichen, sondern nur eine graduelle Automation einzelner Assistenzfunktionen. |
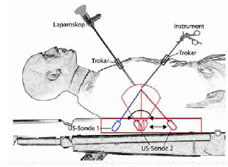
Automatisierte Echtzeit-bildgebung für laparoskopische Eingriffe | Ein in den Tisch integriertes Ultraschallsystem wird mit Motoren zur Positionierung und Ausrichtung des Ultraschallkopfes ausgestattet, um in der Urologie von der Rückseite des OP-Gebiets automatisch, dem Instrument oder dem Organ folgende Echtzeitbilder zu generieren (LU 604/27-2, STO 268/2-1). Die wissenschaftliche Fragestellung lautet, in welchem Umfang und mit welcher Genauigkeit und Verzögerung dies möglich ist. |

Steuerung eines flexiblen Endoskops | Für ein flexibles Endoskop wird eine Antriebskupplung realisiert, die es erlaubt, das unveränderte Endoskop automatisiert im Körper zu bewegen. Dies erfolgt über die Kippung der Spitze, die Drehung des Endoskop und der Vorschub des Endoskops. Ein in das Endoskop integriertes Positionsmesssystem erlaubt es, die Bilder zu mappen und mit präoperativen Bilddaten zu registrieren (DI 1404/2-1, LU 604/24-1). Die wissenschaftliche Fragestellung lautet, in welchem Umfang und mit welcher Genauigkeit in Vorteil erreicht werden kann. |
Mikromani- | Ein Mikrorobotersystem wird entworfen, das in der Lage ist, normalen chirurgische Instrumente und führen und zu aktuieren. Dadurch kann die Bewegung des Instruments durch einen Joystick erfolgen (DI 1404/3-1, LU 604/25-1). Die wissenschaftliche Fragestellung lautet, ob der Einsatz eines Robotersystem bzw. eine Mikro-Manipulators tatsächlich Vorteile bringen kann, welches dies sind, und welche Hürden noch bestehen. |

Leistungssteuerung von chirurgischen Instrumenten mit Hilfe funktioneller Daten des Neuromonitorings | Das grundsätzliche Verfahren wurde 2003 von den Gruppen Lenarz/Heermann und Lüth/Strauß vorgeschlagen. Im Rahmen dieses Projekts (DI 1404/4-1, LU 604/26-1) soll wissenschaftlich untersucht werden, ob eine Instrumentenleistungsregelung durch Neuromonitoringsignale möglich ist. |

Universitätsklinikum Leipzig AöR | Die Klinik und Poliklinik für HNO-Heilkunde (Prof. Dietz) mit dem LOA PD Dr. Gero Strauß und die Klinik und Poliklinik für Urologie (Prof. Stolzenburg) sind von Seiten der Universität Leipzig (gegründet im Jahr 1409) mit beteiligt. |

Technische Universität München | Der Lehrstuhl für Mikro- und Medizingerätetechnik (Prof. Lüth) ist von Seiten der Technischen Universität München (gegründet im Jahr 1868) mit beteiligt. |
Es handelt sich um ein reines Grundlagenforschungsprojekt ohne Beteiligung der Industrie.