KETSIM / XKETSIM
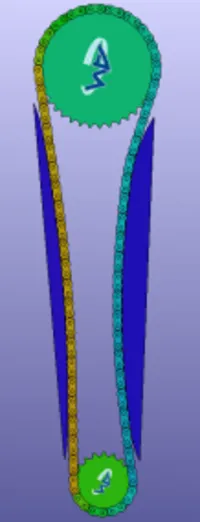
Bei dem Programm KETSIM handelt es sich um ein Dynamiksimulationsprogramm für Steuerkettentriebe von Verbrennungsmotoren. Das Programm umfasst Steuerketten von Typ Rollen- und Hülsenkette sowie Zahnketten. Neben der reinen Steuerkette mit den zugehörigen Führungs- und Spannschienen können in die Simulation auch hydraulische Kettenspanner sowie elastische Kurbel- und Nockenwellen mit aufgenommen werden. Die Kontakte zwischen den Kettenglieder und Kettenrädern werden durch Starrkörperkontakte modelliert. Dies führt zu einer deutlichen Reduktion der Rechenzeit gegenüber einer Modellierung mit Kontaktsteifigkeiten. Für die Visualisierung des Kettentriebs steht eine Datenausgabe für das Programm OpenMBV zur Verfügung.
Das Programm wurde hauptsächlich im Rahmen von Forschungsarbeiten, welche durch die FVV finanziert wurden, entwickelt. Für weitere Informationen kontaktieren Sie bitte den Lehrstuhl.
Keywords: Steuerkettentrieb, Kettentrieb, Dynamiksimulation, Simulation, Kettensimulation
HYSIM
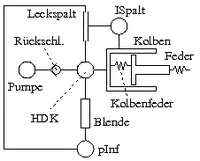
HYSIM ist ein Simulationsprogramm für hydraulische Netzwerke. Zur Darstellung von mechanischen Kontakten, Rückschlagventilen und anderem nutzt dieses Programm ein- und zweiseitige Bindungen, um die Rechenzeiten deutlich zu verringern. Das Programm wird zurzeit hauptsächlich für die Modellierung von hydraulischen Kettenspannern, wie sie z.B. in Steuerkettentrieben vorkommen, eingesetzt. Diese können über eine Co-Simulation an das Programm KETSIM dynamisch angekoppelt werden.
Das Kernprogramm ist hauptsächlich durch eine Dissertation am Lehrstuhl entstanden und wurde im Rahmen von Forschungsarbeiten, welche durch die FVV finanziert wurden, um Komponenten für die Berechnung von hydraulischen Kettenspannern erweitert. Für weitere Informationen kontaktieren Sie bitte den Lehrstuhl.
Keywords: Hydraulik, hydraulische Simulation, Ölhydraulik, Kettenspanner
MBSim

MBSim stellt ein allgemeines Simulationstool für Mehrkörpersysteme dar. Diese Software ist besonders auf die effiziente Behandlung von ein- und zweiseitigen Starrkörperkontaken zur Berechnung nicht glatter Dynamik ausgelegt. Als Integrationsverfahren stehen in MBSim unter anderen moderne Time-Stepping Methoden zur Verfügung. Die in MBSim erstellten Modelle können über eine Schnittstelle zu OpenMBV mit diesem visualisiert werden.
Die Kernfunktionalität von MBSim wurde am Lehrstuhl im Rahmen von Dissertationen entwickelt und steht auf der Hosting-Platform Github unter der GNU Lesser General Public Licence zur Verfügung.
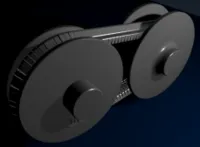
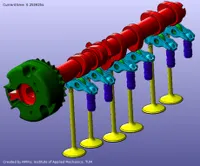
Im Rahmen von mehreren Forschungsarbeiten im Zusammenhang mit Industriepartnern und Forschungsgesellschaften sind spezielle Erweiterungen für Ventiltriebe und andere relevante Teile im Bereich der Motormechanik und Antriebstechnik hinzugekommen, welche nicht Bestandteil des MBSim Kerns sind. Detailliertere Informationen zur Berechnung und Simulation von z.B. Ventiltrieben, Nockenwellenverstellern und CVT-Getrieben (siehe Bilder) finden Sie unter der Rubrik Forschung.
Neben der Anwendung von MBSim als C++-Bibliothek steht auch ein XML-Interface für den Modellaufbau zur Verfügug.
Für weitere Informationen wenden Sie sich bitte an den Lehrstuhl.
Keywords: Mehrkörpersimulation, Mehrkörper, Simulation, MKS, Mehrkörpersystem, nicht glatt, Time-Stepping, mengenwertig, Ventiltrieb, Ventiltriebsimulation, Ventiltriebssimulation, Stoß, flexible MKS, continuous variable transmission, CVT
MBSim Links/Downloads
Homepage
OpenMBV
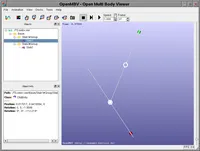
Bei dem Programmprogramm OpenMBV handelt es sich um ein Visualisierungsprogramm für allgemeine starre und flexible 3D-Mehrkörpersysteme. Durch die Definition eines Dateninterfaces für die Eingabedaten des Programms, welche sowohl die Geometrie als auch die Bewegung und Verformung der einzelnen Körper beschreiben, ist dieses Programm vollständig unabhängig von einem Daten generierenden Programm. Dieses Interface beruht auf XML und HDF5 Dateien. Es existiert eine Implementierung des Interfaces für die Datenausgabe unter der Programmiersprache C++. Zur Gewährleistung der maximalen Performance des Programms ist die Grafikausgabe über OpenGL gelöst.
Das Programm wurde am Lehrstuhl entwickelt und steht als Quellcode unter der GNU General Public Licence zur Verfügung. Der Quellcode wird auf der Hosting-Platform Github gehosted.
Bei OpenMBV handelt es sich um eine vollständige Neuentwicklung des Tools AMVis.
Keywords: Mehrkörpervisualisierung, Visualisierung, Mehrkörperanimation, Animation
OpenMBV Links/Downloads
AMVis
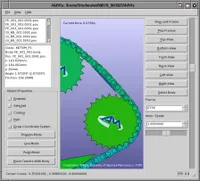
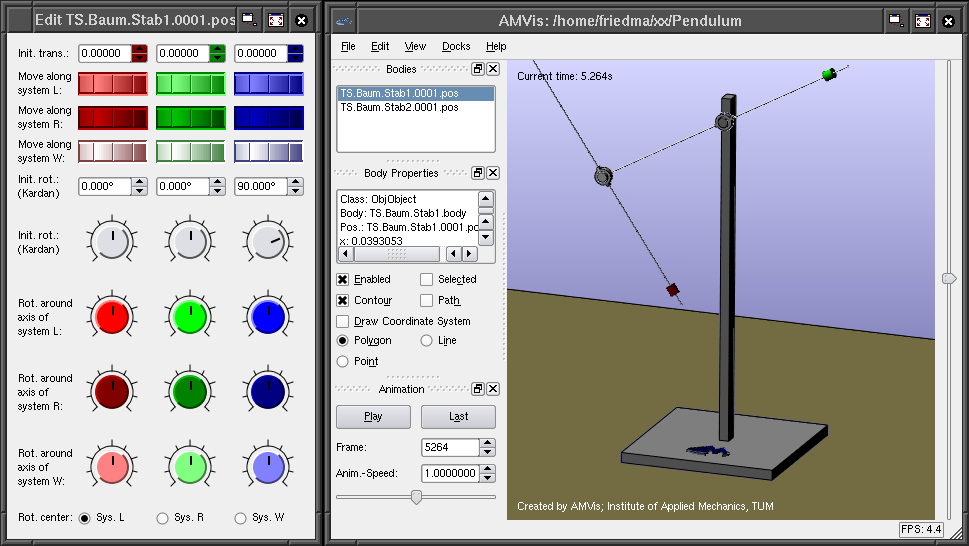
AMVis wird nicht mehr weiterentwickelt! (siehe OpenMBV)!!!
Bei dem Programmpaket AMVis handelt es sich um ein Visualisierungsprogramm für allgemeine starre und flexible 3D-Mehrkörpersysteme. Durch die Definition eines Dateninterfaces für die Eingabedaten des Programms, welche sowohl die Geometrie als auch die Bewegung und Verformung der einzelnen Körper beschreiben, ist dieses Programm vollständig unabhängig von einem Daten generierenden Programm. Dieses Interface beruht auf Ascii-Dateien: Dadurch können die Daten auch von Hand erstellt werden. Es existiert jedoch auch eine Implementierung des Interfaces für die Datenausgabe unter den Programmiersprachen Octave/Matlab sowie C++. Zur Gewährleistung der maximalen Performance des Programms ist die Grafikausgabe über OpenGL gelöst.
Das Programm wurde am Lehrstuhl entwickelt und steht als Quellcode unter der GNU General Public Licence zur Verfügung.
Keywords: Mehrkörpervisualisierung, Visualisierung, Mehrkörperanimation, Animation
AMVis Downloads
Version 2.6.0:
AMVis (Source, alles)
AMVisC++Interface (Source)
AMVisOctaveInterface
AMVis-Linux (Binary)
AMVis-Windows (Binary)
Beispiele:
Chain-Drive (KETSIM)
Pendulum (MBSim)
Videos:
Chain-Drive (KETSIM)
Pendulum (MBSim)
Screenshots:
Mainwindow
{kind=link}