KETSIM / XKETSIM
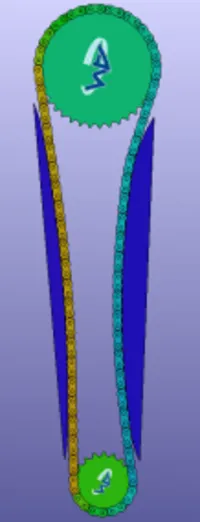
The program KETSIM is a software tool to simulate the dynamics of timing chain drives of combustion engines. The program contains different types of timing chains, namely bush and roller chains and toothed chains. Besides the pure chain together with the associated fixed and tensioning guidings you can also simulate hydraulic chain tensioners and elastic crank and cam shafts. The contacts between the chain links and the chain wheel are modelled with rigid contacts. This leads to a significant reduction in computing time in comparision to modelling local contact stiffness. A graphic data output to the software OpenMBV provides the visualisation of the chain drive.
The program was developed mainly within research studies financed by the FVV. Please contact the Institute for additional information.
Keywords: timing chain drive, dynamic simulation
HYSIM
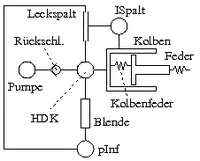
HYSIM is a simulation program for hydraulic networks. To design mechanical contacts, check valves and the like, this program uses unilateral and bilateral contacts to reduce the computing time significantly. Currently it is used mainly for modelling hydraulic chain tensioners, as they can be found in timing chain drives for instance. This tensioners can be dynamically coupled with KETSIM by a co-simulation interface.The kernel was mainly generated by a dissertation at the Institute. It was expanded by components to calculate hydraulic chain tensioners within research studies, financed by the FVV. Please contact the Institute for additional information.
Keywords: hydraulic simulation, oil hydraulic, chain tensioner
MBSim

MBSim represents a universal simulation tool for multibody systems. The main focus of this software is the efficient treatment of unilateral and bilateral rigid contacts to calculate nonsmooth dynamics. As integration method amongst others modern time stepping methods are available in MBSim. The created models can be visualized by an interface to OpenMBV.
The kernel of MBSim was developed at the Institute within a dissertation and is provided under the GNU General Public License on the hosting platform Github.
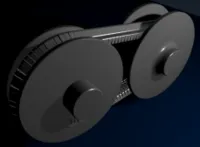
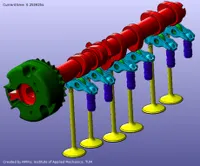
Within several research studies in cooperation with industrial customers and research communities special extansions for valve gears and other relevant parts in the range of motor and drive engineering were added, which are not components of the kernel. In the category Research you can find detailled information on the calculation and simulation of valve gears, camshaft phasing units and CVT-drives for instance (see pictures).
Beside the usage of MBSim as a C++-Library there exists also a XML-Interface for the model building.
Please contact the Institute for additional information.
Keywords: multi body simulation, multi body system, MBS, non smooth, time stepping, set valued, valve train, impact, flexible MBS, continuous variable transmission, CVT
MBSim Links/Downloads
OpenMBV
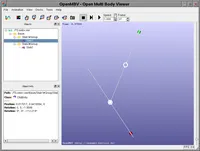
The software OpenMBV is a visualisation programm for general rigid and flexible three dimensional multibody systems. By the definition of a data interface for data input of the program, which contain the geometry as well as the motion and deformation of each body, this program is independent of the data generating program. The interface is based on XML and HDF5 Files. There exists an implementation of the interface for data output in the programming language C++. To ensure maximum performance of the program the graphic output is solved using OpenGL.
The program was developed at the Institute, its source code is available under the GNU General Public Licence. The Source-Code is hosted on the Hosting-Platform Github.
OpenMBV is a completely new development of AMVis.
Keywords: multi body visualisation (visualization), multi body animation
OpenMBV Links/Downloads
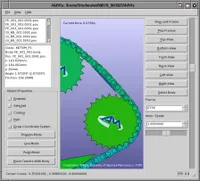
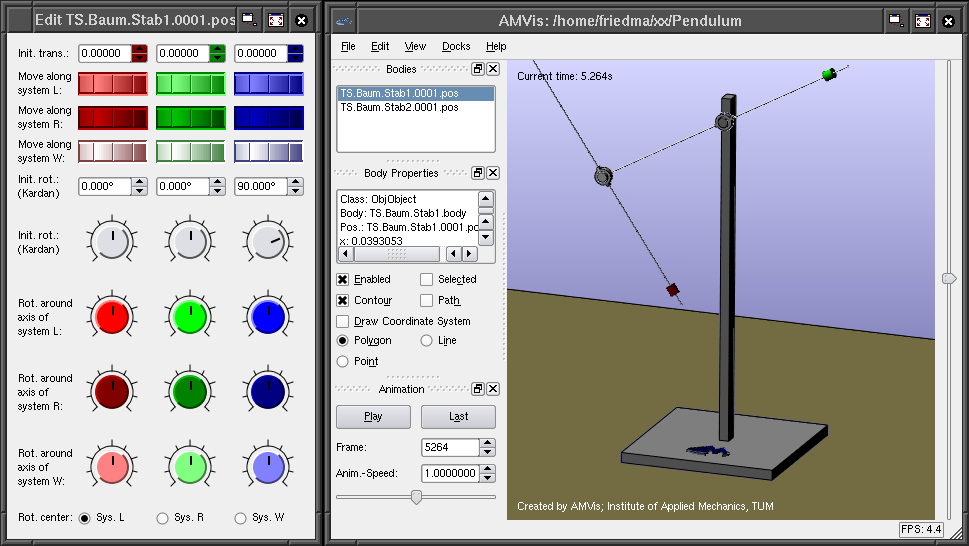
AMVis
AMVis is no longer maintained! (see OpenMBV)!!!
The software AMVis is a visualisation programm for general rigid and flexible three dimensional multibody systems. By the definition of a data interface for data input of the program, which contain the geometry as well as the motion and deformation of each body, this program is independent of the data generating program. The interface works with ascii-data: this enables a manual development of the data. Besides there exists an implementation of the interface for data output in the programming languages Octave/Matlab and C++. To ensure maximum performance of the program the graphic output is solved using OpenGL.
The program was developed at the Institute, its source code is available under the GNU General Public Licence.
Keywords: multi body visualisation (visualization), multi body animation
AMVis Downloads
Version 2.6.0:
AMVis (Source, alles)
AMVisC++Interface (Source)
AMVisOctaveInterface
AMVis-Linux (Binary)
AMVis-Windows (Binary)
Beispiele:
Chain-Drive (KETSIM)
Pendulum (MBSim)
Videos:
Chain-Drive (KETSIM)
Pendulum (MBSim)
Screenshots:
Mainwindow
{kind=link}