Automated guided vehicles (AGVs) are taking on more and more transport tasks and are an integral part of automated intralogistics systems. In particular, AGVs can be used effectively for the transport of standardized load carriers. However, they are not capable of performing other activities during transport, such as handling the transported objects, in order to ultimately add value to the transport process.
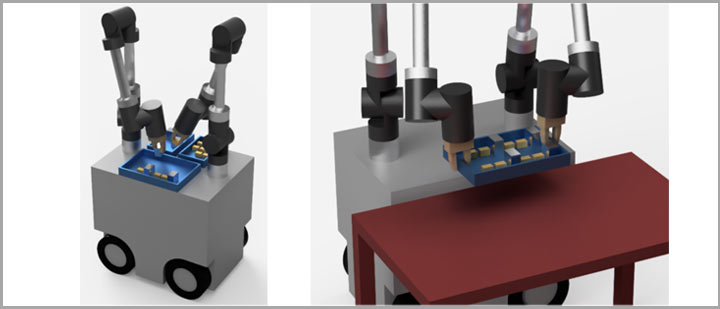
The aim of the project is to expand the range of tasks performed by AGVs to include complex handling and pre-assembly processes. In order to increase efficiency in real applications, these processes should also be able to be performed while the vehicle is in motion. To achieve this goal, a mobile robot with two collaborative manipulators is being developed, which combines transport with the manipulation of objects and thus adds value. In particular, this can also eliminate tasks currently performed manually on mobile platforms and, in turn, enable stationary work for humans even in flexible production processes. For robust and efficient operation, an AI-based control system is designed that can react flexibly to load peaks and errors, as well as incorporate previous experience into future decision-making.
At the beginning, a requirements and process analysis is performed, which serves as a basis for the further work. The first step is to define application scenarios from industry and derive requirements for the system to be developed.
Subsequently, a coordinated manipulation of firmly gripped objects will be pursued, in which both robot arms handle different parts. For a flexible pick-up and delivery of objects, a commercial image processing system will be used, which allows object recognition and determination of the gripping poses. While many handling processes in pre-assembly or picking of bendable components cannot be accomplished using a single-arm setup, the next step is to use the existing dual-arm setup to implement the manipulation of jointly gripped objects. Since standard industrial robots do not have the necessary capabilities for cooperative multi-arm application or the extension by means of force sensors at the end-effector is costly, two collaborative robot arms will be used.
Based on an AGV already developed at the Chair of Materials Handling Material Flow and Logistics, the mobile platform will be adapted in terms of design and control to the needs of the use case defined in this project. For this purpose, among other things, a concept for the assembly, control and power supply of the two collaborative robot arms on the platform is to be developed, which will enable handling processes to be carried out parallel to travel. In addition, the loading and assembly area on the mobile platform is to be designed to be modifiable for different transport goods and handling processes.
In order to increase the robustness and efficiency of the mobile robot in an industrial environment, both a novel task planning and a (semi-) autonomous error recovery will be integrated, each based on AI methods. Task scheduling ensures optimal utilization of the mobile system. Depending on the parts demand in the assembly cells, for example, the system will balance between complete pre-assembly and the fastest possible transport. The error recovery system should be able to detect disruptive effects (such as a non-detectable object) that lead to deviations in the target process and calculate a suitable alternative plan.
After integration of the components in a demonstrator, exemplary use cases will be implemented and technically evaluated.
This research in conducted in collaboration with the Chair of Applied Mechanics (am). For object detection, the camera system of robominds GmbH is used. Interested companies are:
- HAWE Hydrauli SE
- Abele Ingenieure GmbH
- Grenzebach Maschinenbau GmbH
- Jungheinrich Moosburg AG & Co. KG
- Stäubli WFT GmbH
- F.EE GmbH
- Toposens GmbH
- Baumann GmbH
- ONTEC Automation GmbH
- robominds GmbH