As part of the advancing automation of material flow in logistics, automated guided vehicles (AGVs), which also include autonomous forklifts, are increasingly being used. These systems consist of a master controller and several (possibly different) automated guided vehicles (AGVs) that transport and store materials, for example. The master controller takes over the central coordination of the FTF fleet, such as order distribution or fleet management. The FTF is responsible for fulfilling the order in the production facility and must be able to handle the processing of data-intensive and latency-critical functions for this purpose, as well as collaborate safely with humans at the same time. An autonomous forklift, which is a far more complex system than an AGV, generates large amounts of data for both transport and container handling, which is currently processed on the forklift, evaluated and transferred to the vehicle controller via command. Unlike most FTFs, however, the forklift is not limited to a single process, such as the transport of containers, but is used for multiple processes, like truck loading and unloading or block storage management.
To execute the tasks assigned by the master controller, the autonomous truck uses sensors to record the environment, processes the sensor data with the aid of intelligent algorithms and performs the next action to accomplish the task. These functions are often data-intensive and latency-critical (e.g., collision avoidance or container detection using a camera) and are calculated and processed on the local computing unit of the autonomous truck.
Furthermore, autonomous forklifts have additional safety equipment to be considered separately, which enables the vehicles to work safely in the environment with people, especially in the area of the forks. This safety equipment is made up of sensors and a computing unit that can verify a certain probability of failure and thus a corresponding performance level (PL). In practice, these systems check for the presence or absence of an object in the working area. As soon as objects are in the previously defined working field, the computing unit interrupts further actions of the system. Advanced systems check not only the presence of objects, but also the current speed and the required braking distance to stop the system in time.
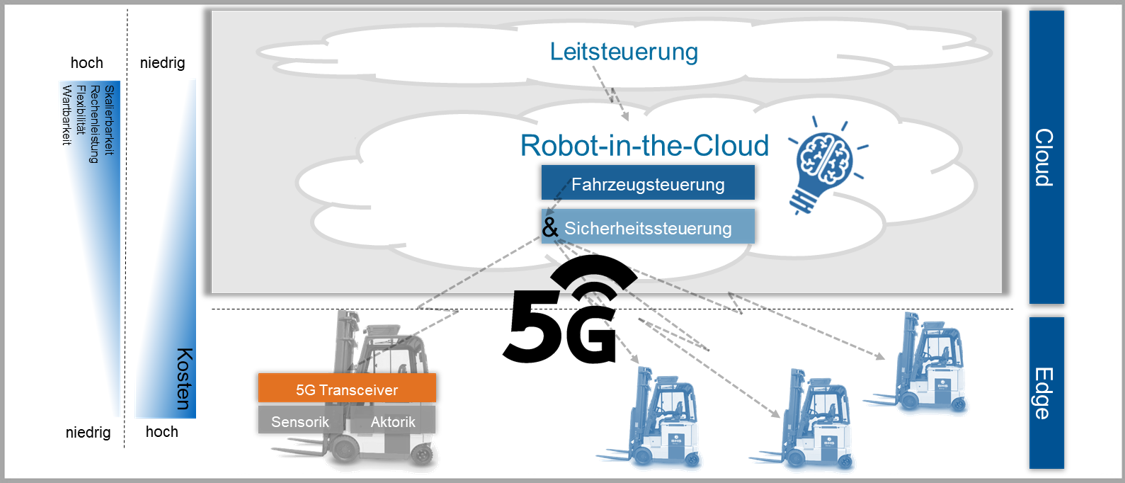
Previous communication technologies did not allow the outsourcing of data-intensive, latency-critical and safety-critical functions to the cloud, such as camera-based navigation and detection or camera-based functional security via the cloud, due to low bandwidth, high latency as well as a lack of radio cell change (handover) and redundancy. However, the introduction of 5G as a new communication technology opens up completely new application areas. The project Robot-in-the-Cloud will therefore analyse which data-intensive, latency-critical and safety-critical edge components can be outsourced to the cloud with the help of 5G technology.
The aim of the funded project is to develop recommendations for action for the efficient and economic use of the results of Robot-in-the-Cloud. First, requirements engineering is used to capture all relevant requirements for the Robot-in-the-Cloud business model, taking into account the current state of science and technology. Based on the results, different wireless technologies and cloud solutions are identified and selected using an extensive literature review and interviews with experts. Safety-relevant functions of autonomous forklifts are determined by standards, norms and guidelines. In addition, expert interviews are also conducted to take into account the requirements of the market for the architecture of the system. Subsequently, the identified requirements are derived into technical requirements for the system and architecture structure (software). This is followed by the recording of the current state of data-intensive, latency-critical and safety-relevant functions on the autonomous forklift capable for outsourcing to the cloud. A detailed system architecture is developed taking the identified requirements into account. The technical feasibility analysis for outsourcing suitable functions to the cloud includes setting up the test environment at fml, modifying an autonomous forklift for truck loading and unloading, setting up and programming the cloud server, and tests the system under laboratory conditions. In parallel, another autonomous forklift will be set up for block storage management. In the end, both trucks will be tested under real conditions, with both forklifts using the Robot-in-the-Cloud approach. The direct comparison of both forklifts with and without the Robot-in-the-Cloud approach enables validation as well as the derivation of optimization potentials and recommendations for action for the efficient and economical use of Robot-in-the-Cloud.