High Precision SLAM
High precision SLAM algorithm for logistic environments
Simultaneous Localization and Mapping is a core feature for the deployment of robots in logistic environments. Nowadays, several solutions exist to the problem of indoor localization of Autonomous Mobile Robot (AMR). However, these solutions not always can meet millimetric accuracy requirements for some logistic and material flow applications.
- Accuracy without auxiliary positioning: under a general stable industrial scenario, the point-to-point non-assisted repeated positioning accuracy must be within ± 10mm, ±1°.
- Accuracy with auxiliary positioning: The system should be able to support secondary accurate positioning schemes such as fiducial codes, RGB color band, reflector, or 3D camera. The secondary positioning accuracy must be within ± 2mm, ± 0.3°, and the positioning operation should be smooth.
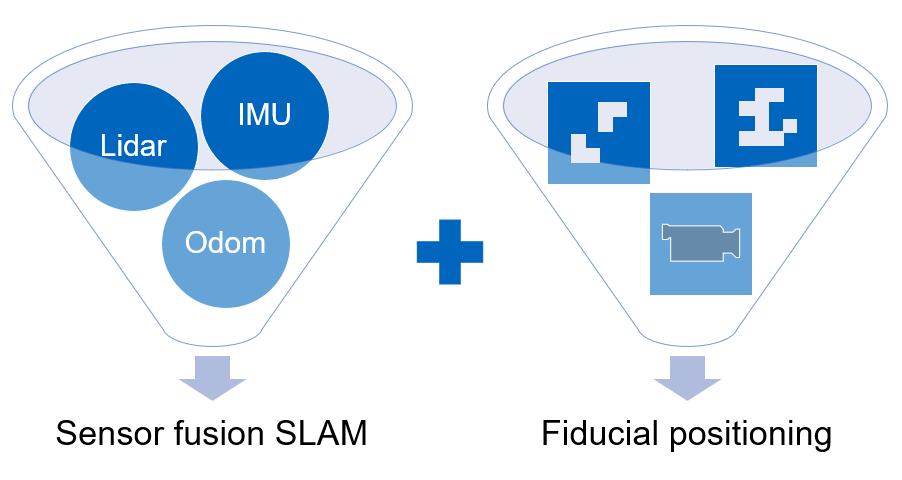
- Development of a main SLAM algorithm fusing Lidar, IMU and odometry data to meet ± 10mm, ±1° accuracy requirements.
- Development of an auxiliary positioning system using fiducial markers and high accuracy depth cameras to meet ± 2mm, ± 0.3° requirements.
- IFP Qingdao
- I-Cow
This project is a cooperation between TUM FML, IFP Qingdao and I-Cow as industry partner