RoboLingo
Ein Interaktionsbaukasten für Roboter in der Intralogistik
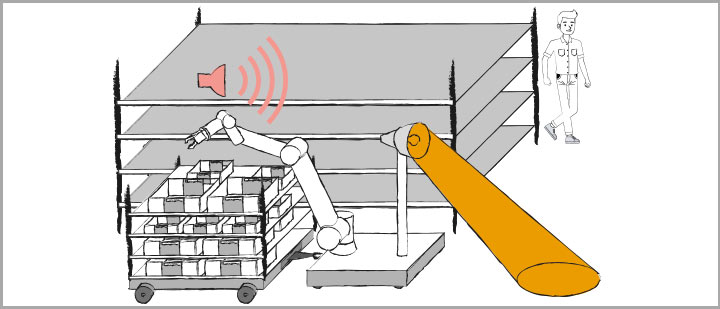
Die Intralogistik in Lager- und Fabrikhallen der Gegenwart und insbesondere der Zukunft beschäftigt sowohl menschliche als auch robotische „Mitarbeiter:innen“, die in verschiedenen Situationen aufeinandertreffen. So zum Beispiel beim Fahren, Rangieren oder Ein- und Ausladen. In diesem Umfeld müssen Wege gefunden werden, die ein effizientes, reibungsarmes und harmonisches gemeinsames Arbeiten ermöglichen. Eine Schlüsselrolle spielt dabei die Kommunikation der Logistik-Roboter mit den Menschen in ihrer Umgebung. Ein Beispiel für einen Kommunikationsweg der Roboter ist der sogenannte „blue“ bzw. „floor spot“. Dabei handelt es sich um einen Lichtpunkt vor einem Fahrzeug, mit dem es bereits von Weitem auf sich aufmerksam macht, bevor es beispielsweise hinter einem Hindernis herausfährt. Zum aktuellen Zeitpunkt gibt es nur vereinzelte Kommunikationsmöglichkeiten für spezifische Situationen, es existiert jedoch keine umfassende Übersicht zu geeigneten Modalitäten für die verschiedenen denkbaren Logistik-Situationen und Kommunikationsabsichten der Roboter.
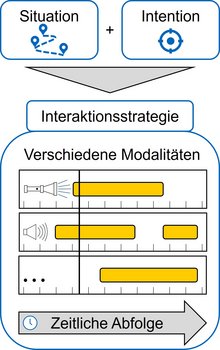
Ziel des RoboLingo Projekts ist es, einen Baukasten zur Auswahl robuster, kontextbezogener und intuitiv verständlicher „Sprachbausteine“ für Roboter aufzubauen und zu evaluieren. Der Baukasten soll die verschiedenen Situationen der Mensch-Roboter-Interaktion (MRI) aufzeigen und Empfehlungen für geeignete Modalitäten der Kommunikation geben, die sicherstellen, dass die Botschaft des Roboters zu jedem Zeitpunkt von den Menschen in seinem Umfeld korrekt verstanden und interpretiert wird. Dadurch können Betreiber Prozesse mit Robotern effizienter gestalten und gleichzeitig eine höhere Akzeptanz von Robotern im Betrieb erzielen.
Zunächst werden gegenwärtige und zukünftige Situationen, in welchen Mensch und Roboter in der Logistik interagieren (und interagieren werden), im Kontakt mit Expert:innen sowie in Beobachtungen analysiert, geordnet und kategorisiert. Parallel werden Modalitäten recherchiert und auf ihre Eignung im Logistik-Kontext hin überprüft. Die zusammengetragenen Situationen und Modalitäten werden schließlich sinnvoll kombiniert. Dabei wird unter anderem nach der Dringlichkeit und Relevanz der Intentionen unterschieden. Die Zuordnung der Modalitäten zu den Aufgaben erfolgt dahingehend, wie verständlich, vorhersehbar, effizient und sicher kommuniziert wird. Eine Schwierigkeit liegt dabei in der Vielfältigkeit sowohl der möglichen Roboter als auch der möglichen Situationen und Intentionen. Der Fokus liegt daher auf den wichtigsten und häufigsten Interaktionen. Zur Evaluierung der Interaktionsmodalitäten soll eine Reihe von Studien mit Proband:innen durchgeführt werden, woraus abschließend Handlungsempfehlungen abgeleitet und Leitlinien für die Industrie verfasst werden.
- AGILOX GmbH
- BLSG AG
- BMW AG
- Filics GmbH
- HAWE Hydraulik SE
- Jungheinrich AG
- KION Group
- Magazino GmbH
- robominds GmbH
- Schiller Automatisierungstechnik GmbH
- SICK AG
- Siemens AG
Das IGF-Vorhaben 22234 N der Forschungsvereinigung Bundesvereinigung Logistik (BVL) e.V. wird über die AiF im Rahmen des Programms zur Förderung der industriellen Gemeinschaftsforschung (IGF) vom Bundesministerium für Wirtschaft und Klimaschutz aufgrund eines Beschlusses des Deutschen Bundestages gefördert.