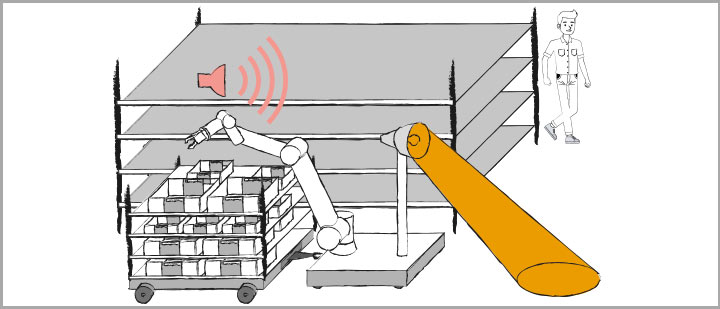
Intralogistics in warehouses and factories of the present and especially of the future employs both human and robotic "employees" who encounter one another in various situations. For example, when driving, maneuvering, or loading and unloading. In this environment, ways must be found to enable efficient, low-friction and harmonious joint working. Communication between logistics robots and the people around them plays a key role here. One example of a communication channel for the robots is the so-called "blue" or "floor spot". This is a spot of light in front of the vehicle, through which it draws attention to itself from a distance before it drives out from behind an obstacle, for example. So far there are only isolated communication channels for specific situations, but there is no comprehensive overview of suitable modalities for the various conceivable logistics situations and communication intentions of the robots.

The goal of the RoboLingo project is to build and evaluate a model kit for selecting robust, context-aware, and intuitively understandable "language building blocks" for robots. The kit will highlight the different situations of human-robot interaction and provide recommendations for appropriate modalities of communication that ensure that the robot's message is correctly understood and interpreted by the people around it at all times. As a result, operators can make processes with robots more efficient while achieving greater acceptance of robots.
At first, current and future situations, in which humans and robots interact (and will interact) in logistics, are analyzed, organized and categorized through observations and contact with experts. In parallel, modalities will be researched and examined for their suitability in a logistics context. The collected situations and modalities are finally combined in a reasonable way. Among other things, a distinction is made according to the urgency and relevance of the intentions. The modalities are assigned to tasks according to how comprehensible, predictable, efficient and safe communication is. One difficulty is the diversity of both possible robots and possible situations and intentions. The focus lies therefore on the most important and frequent interactions. To evaluate the interaction modalities, a series of studies with test persons will be conducted, from which recommendations for action will be derived and guidelines for the industry will be composed.
- AGILOX GmbH
- BLSG AG
- BMW AG
- Filics GmbH
- HAWE Hydraulik SE
- Jungheinrich AG
- KION Group
- Magazino GmbH
- robominds GmbH
- Schiller Automatisierungstechnik GmbH
- SICK AG
- Siemens AG
The IGF project 22234 N of the Forschungsvereinigung Bundesvereinigung Logistik (BVL) e.V. is funded by the AiF within the program for the promotion of joint industrial research (IGF) of the Federal Ministry for Economic Affairs and Climate Action based on a resolution of the German Bundestag.