In all fields of modern engineering there is a demand for powerful and compact high-performance actuators, being the crucial connecting link between information processing and operation process. Recently, huge advances in mechatronics pushed improvements of old actuator concepts as well as the development of new innovative principles. One major goal of actuator research has been performance enhancement, so far. New investigations tend to focus more on reducing volume and power consumption in terms of operational efficiency.
Intensive long-term research activities on actuator technology at the Lehrstuhl für Angewandte Mechanik have established a profound experience in following fields:
- magnetic technology (electromagnetic reluctance force actuators, electrodynamic shaker, ref. Fig. 1);
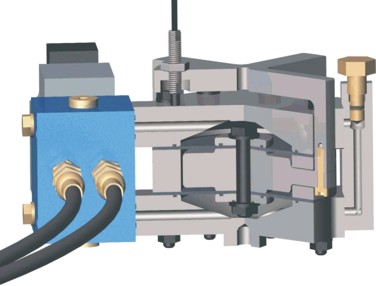
- hydraulics (high-bandwidth hydraulic actuator, ref. Fig. 2);
- shape memory actuator (bio-analogue finger, ref. Fig 3);
- piezo actuator.
Current research projects deal with the electromagnetic shaker (Fig. 1) and hydraulic actuator (Fig. 2), both being designed to meet industrial needs and setting a benchmark in performance-volume-ratio.
Their key data below outlines the capabilities of high actuation forces and high bandwidth at low volume:
- Electromagnetic Linear-Actuator (size-dependent): stroke (2…5) mm, force vector (1…3) kN, bandwidth DC…200 Hz;
- Hydraulic Short-stroke Actuator: stroke 1 mm, force vector 6 kN, bandwidth DC…150 Hz.

Finally, each actuator must reproduce given acceleration signals with high correlation, e.g. to act as a shaker system in test rigs for squeak and rattle. A couple of key issues have to be considered to achieve this goal:
- Control theory: state space control, cascaded control, forward linearization;
- Driving circuitry and periphery: digital signal processing und visualisation, digital power amplifier >1 kW, sensors, servo valves.
Future research will concentrate mainly on electromagnetic phenomena. The advent of high-performance materials (rare earth permanent magnets, soft alloys) offers an enormous potential for efficient application of magnetic forces. In recent developments, attractions forces controlled by coils played a huge part in the electromagnetic field (reluctance force drives, e.g. Transrapid) as well as in electrodynamic applications (lorentz-force type actuators, e.g. electric motor). The inevitable advantages of those systems are contrasted by disadvantages, too, e.g. instability or ohmic losses. Investigations on the Lehrstuhl für Angewandte Mechanik try to present alternative ways for actuation principles:
- Coil-less magnetic actuator: Magnetic flux control without coils and currents;
- Magnetic repulsion forces: Eddy-current induced repulsion forces on fast-moving objects (principle of induction motor).