Real-Time Motion Planning for Manipulators
Within different research projects focusing on path planning and motion control for redundant manipulators, new concepts are developed and promising approaches, verified on our humanoid LOLA, are transferred to industry. During past projects, e.g. CROPS, we developed new hardware that was applied for efficient harvesting in agricultural robotics. Today's focus within the SAINT project described below lies on real-time capable planning and control algorithms for human-robot collaboration.
Research Topics
- Real-time capable trajectory planning for redundant robots in time-varying environments.
- Utilization of the characteristics of a torque-controlled robot for safe human-robot collaboration.
Supervised Autonomous Interaction in uNknown Territories (SAINT)
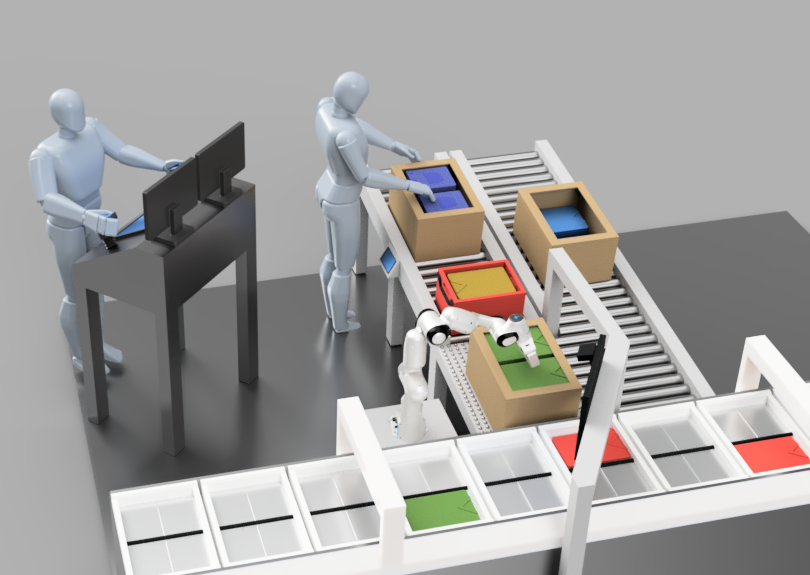
Economic solutions for Bin Picking, the separation of chaotically distributed parts, are still rare and only found for well-known environments. The efficiency of an employee and his low error rate can hardly be reproduced with robots for which, among other things, long calculation times of gripper poses and trajectories still cause severe problems. The SAINT project addresses theses challenges using an example scenario from logistics in which a seven-axis collaborative robot, equipped with a camera system, picks parts out of a bin and places them onto a conveyor belt. Within the research consortium, the Chair of Applied Mechanics develops a real-time capable C++ motion planning framework. In contrast to typical industrial applications, the path is not planned offline and continuously repeated, but instead recalculated online for each gripping process. For the application in logistics, optimal planning and control algorithms minimizing time and energy consumption, play a crucial role.
Third-Party libraries used within the development process
- The inhouse developed library broccoli provides generic robotic algorithms and is used within submodules like the Inverse Kinematics.
- The Robot Operating System (ROS) is used as the middleware for the robotic application. The used components include the whole ROS communication (e.g. to get user input via teleoperation) as well as specific ROS packages e.g. for visualization purposes.
- The manipulation platform MoveIt! is used to setup the framework for motion planning components, e.g. the interaction of State Validity Checkers and Samplers.
- The Open Motion Planning Library (OMPL) is the default backend in MoveIt! for motion planning in configuration space. It provides basic implementations for further modules such as State Samplers.
- OMPL, however, does not provide algorithms to check the validity of a robot state. Therefore, the Flexible Collision Library (FCL) is used for modeling the robot and the environment and for performing collision checks. For the involved distance calculations FCL uses the libccd in case of convex shapes.
- For linear algebra and the representation of rotations, the Eigen library is used.
Project Partners
Besides the Chair of Applied Mechanics three project partners are involved in the realization of the project. The Chair of Astronautics (TUM) contributes a fault recovery and teleoperation module, which allows the robot system to recover from fault conditions autonomously or by incorporating input from a human operator. Further information can be found here. FRANKA EMIKA GmbH provides the Panda robot and adds a gripper with an integrated camera system which creates a map of the environment, recognizes products and suggests possible gripping poses. FIEGE Logistics is interested in innovative logistics solutions and provides the industrial use case at one of its facilities.
Acknowledgements

This project was supported by the Bayerische Forschungsstiftung (BFS).
Contact
Jonas Wittmann, M.Sc.