CyberWalk – ungehindertes Gehen in virtuellen Welten
The CyberWalk project follows a holistic approach covering science, technology and application by integrating the necessary blend of cognitive understanding with high fidelity technological development, to end up with a fully immersive showcase.
Despite recent improvements in Virtual Reality technology it is at present still impossible to physically walk through virtual environments. In this project our goal is to significantly advance the scientific and technological stateof-the-art by enabling quasi-natural, unconstrained, and omni-directional walking in virtual worlds. To achieve this visionary goal we follow a holistic approach that unites science, technology and applications, CyberWalk will develop a completely novel concept for a high-fidelity omni-directional treadmill, named CyberCarpet. This treadmill is envisioned to be a 2D platform that should allow unrestricted omni-directional walking, permitting the user to execute quick or slow movements, or even step over and cross his or her legs. At the end of the project it is foreseen that we will have an easy-to-use device that has been constructed to fit individual needs.
Its widespread use will be facilitated by the fact that users can get quickly prepared to use it: the visual tracking that supports the control operates markerless.
One only has to put on Head Mounted Display, through which the virtual environment is displayed. The concept of motion control behind this treadmill will focus on diminishing the forces exerted on the walking user, by minimizing the overall accelerations.
To place the developments on a solid human-centred footing CyberWalk will continuously push research in the field of cognitive/behavioural science and will determine the necessary psychophysical design guidelines and appropriate evaluation procedures. The CyberWalk project will showcase its developments via a physical walkthrough, most probably through the virtual reconstruction of the ancient city of Sagalassos.
However, it seems clear that the CyberWalk approach will also prove relevant to many other application areas such as medical treatment and rehabilitation (Parkinson’s disease, phobia, etc.), entertainment, sports (training facilities, fitness centers), behavioural science, education, training (maintenance teams, security guards, etc.), and architecture (exploring large virtual construction sites).

Cyberwalk
The cyberwalk is an omidirectional motion platform which enables the compensation of any motion of the user which stands on it.
Video 1: Person walking on Cyberwalk, no active control (person reacts to platform), slow speed
Video 2: Cyberwalk speeds up to 80% of maximum velocity (belt direction, main chain will also achieve this speed after extension)
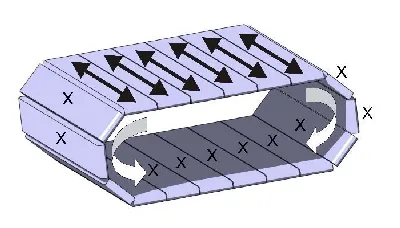
Basically the platform consists of several belts which form an endless torus. The belts can be actuated and generate motion in one direction (X), the whole torus can rotate and generates motion an a second direction (Y). As the two motions can be controlled independently, any resulting motion can be generated to recenter a person.
The actual implementation offers 3.5 to 4.6 meters of walking space and will be sized up to 5.5 times 4.6 meters by december 07 speeding up to 2 m/s (person starts jogging). As far as known this is the lagest and fastest implementation wordlwide at the moment (Stated Oct 07).
The plaform can be easily sized up by its modularity. The theoretical span is almost unlimited by an innovative construction (patend pending). As size matters with regard to the maximum allowable accelerations on a human on the platform, this implementation can be considered as a major breakthough in the history of motion platform construction.
Fields of application:
- The "holodeck": The user is equipped with a Head Mounted Device (HMD) which shows the virtual reality. The HMD is trackes with a motion tracking system, on the one hand to generate the video data for the stereo vision of the HMD, on the other side to calculate the deviation of the user from the platforms center. This deviation is used to recenter the user. By respecting acceleration limitations and other restrictions, this process will not be noticed by the user. Many different applications are possible, from a walk to a new designed urban area to the research of an order picking process in an innovative environment. Within this project, it is possible to walk around in the ancient Pompeij using the city engine.
- Research of walking parameters and perception
- The platform can help to research the acceleration restrictions which are given in certain standing and walking phases. Also the effects of the sensorfusion in the brain can be studied.
- Many other fields of application are available from training of security personnel or therapy of disabled persons.


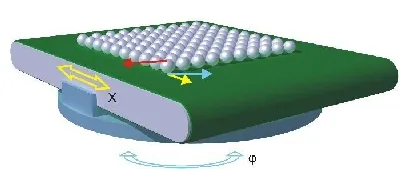
Cybercarpet
The Cybercarpet is a small scale implementation of a ball bearing platform. The basic principle has been outlined in patent applications and could also be seen in the hollywood movie "Disclosure" (1994) in an artistic representation. We were able to implement the platform in a way that it is now able to really walk on the platform and execute perceptual studies about the ball array and its behaviour. Moreover a small test vehicle was built to carry out downscaled trajectories which were recorded via GPS and accelerometers. The platform is able to speed up to 2m/s on the belt system and 2 rad/s on the rotational DOF, including a walking area of approximately 0,8m in a hexagonal shape. Up to now (Oct 07) the fastet and biggest implementation of this platform type.
Watch the videos:
Experiment with vehicle showing closed controll loop: the executed path would have been a quare in real word (most unconvenient trajectory for the control because of singularities occuring)
Walking experiment: The velocity of the platform is accelerated up to the point where the balls get unstable in the holding grid. This occurs at approximately 1.4 m/s. Measures to avoid this flipout are described in the paper.
Publications:
"Cyberwalk: Implementation of a ball bearing platform for humans"
published at the "Conference on Human Computer Interaction", Beijing, China, July 2007
"A 2D-Motion Platform: The Cybercarpet"
published at the "World Haptics Conference", Tsukuba, Japan, March 2007



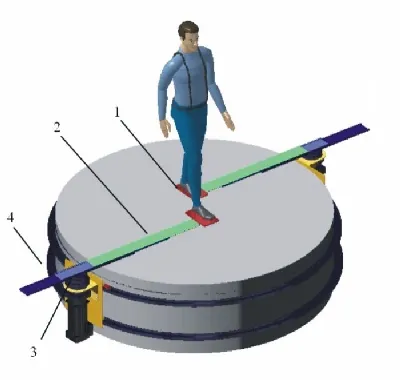
Foot Following Device
Many foot following devices were published in the recent years, many prototypes have been built. The thing which lacks these devices is the possibility to make sudden turns. The proposed device consists of of three degrees of freedom (1-3) per foot which provide the foot following capabilities. Moreover, a fourth degree of freedom (4) is added to rotate the whole system in case of curved walking or turns.

Links:
- Project official website
- Press information (workshop)
- Pictures free for publication (by Tina Weidgans)
Project Partners
- AFWO Agentur Friederike Wolf-Oberhollenzer (management)
- DIS Robotics laboratory (higl level control tracker->velocity commands)
- ETH Zürich Vision Lab (Visualisierung / Pose Tracker) / Procedural
- Max Plack Institute for Biological Cybernetics (project management, perception)
Credits:
We like to thank the companies which helped us to realize the project by providing good conditions and/or free samples
- Ultratronik (Human-Machine-Interface)
- GGB Bearings (chain bearings)
- Maschinenbau Kitz / Reichenbach (belt systems)
- Metallbau Pröbst (framework)
- tw-photography (photo and video)