People have been fascinated by walking machines for a long time. A growing number of research groups is addressing the problem of realizing biped robots. Large advances in the development of actuators, sensors and particularly computers allow for the realization of more and more sophisticated walking robots. Within the framework of the DFG “Priority Program Autonomous Walking”, the JOHNNIE-project developed and build an autonomous biped walking robot. The main objective was to realize an anthropomorphic walking machine with a human-like, dynamically stable gait. The robot is able to walk on even and uneven ground and around curves. Further, a jogging motion is planed, which is characterized by short ballistic phases where both feet are not in contact with the ground. The robot is autonomous in terms of actuators, sensors and computational power, while the energy is supplied by a cable.
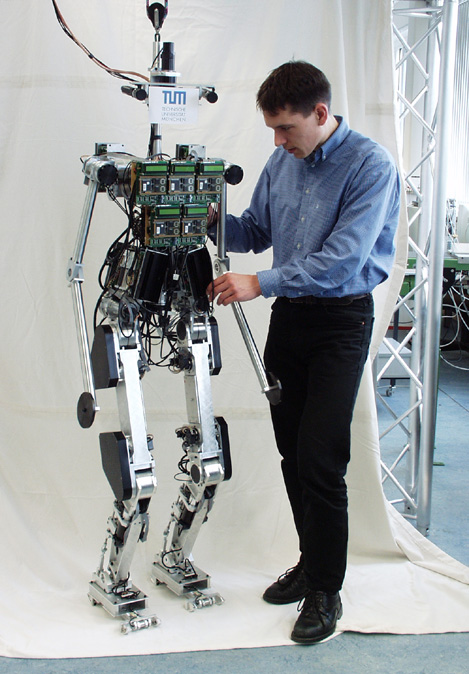
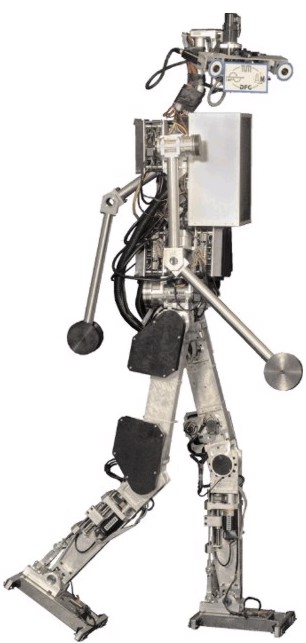
JOHNNIE's structure resembles the human locomotor apparatus and has a total of 17 actively driven joints. The overall weight is about 49kg, the height is 1,80m. Each leg incorporates six driven joints. Three of them are located in the hip, one actuates the knee and another two drive the ankle joint (pitch and roll). Furthermore, the upper body is equipped with a rotational degree of freedom about the body's vertical axis. Two arms with two DoFs each are employed to compensate the overall momentum about the body vertical axis. The joints are driven by brush DC-motors in combination with lightweight gears. Joint angles and velocities are measured by incremental encoders. Further, two six-axis force sensors in the feet measure the ground reaction forces. An inertial measurement unit consisting of a three-axis accelerometer and three gyroscope sensors determines the spacial orientation of the upper body. A PCI-I/O-board interfaces the main computer (Pentium IV 2,8GHz) with the sensors and motor drivers. The control algorithms run on the PC as RT-Linux kernel modules.
JOHNNIE's control system is subdivided into three layers. The top layer handles the computation of the trajectories and switches between different walking patterns and phases of gait. One step is composed of various different phases such as the stance and swing phases. For each of these phases, the robot's motion is computed such that the planned trajectory does not lead to a tilt or lift off of the stance foot. On the second level the system dynamics are controlled, so that the robot can keep its balance. Even when the reference trajectories are ideal, the upper body may deviate from its reference due to ground inclination or external forces. The inclination of the robot is measured with the inertial measurement unit and the trajectories are adapted such that the upper body is stabilized in an upright position. The balancing control uses a reduced system model which can be computed in real time. Simultaneously a force-torque control ensures that the feet do not tilt, which is necessary in order to maintain controllability.
The control scheme has been tested intensively using a multibody simulation program. Standing, walking and jogging can be controlled stably and external disturbances are eliminated effectively. Today, Johnnie can walk with a speed of 2.2km/h. Future work will focus on realizing a faster walking motion. On the Hannover Fair 2003, Johnnie was presented with a visual guidance system developed by the Institute of Automatic Control Engineering of the Technical University Munich. With this vision system, the robot is able to detect obstacles and to decide whether to step on, over or walk around them. The project was supported by the Deutsche Forschungsgemeinschaft (German Research Foundation) within the Priority Program Autonomous Walking.