Results from the JOHNNIE-project suggest that significant increases in walking speed, dexterity and autonomy are only possible if the robot's hardware is updated to state of the art mechatronics technology. To achieve these goals, we developed the humanoid robot LOLA as part of the project-cluster "Natur und Technik intelligenten Laufens" (biological and technical aspects of intelligent locomotion) financed by the Deutsche Forschungsgemeinschaft (German Research Foundation).
Research Objectives
The objective of our research is to build a machine capable of fast, human-like and autonomous walking. We also addressed the robot's autonomy by improving the integration of visual perception and walking control. The vision system was developed at the Autonomous Systems Technology Institute, Universität der Bundeswehr München.
Improved autonomy also requires greater robustness, flexibility and the on-line adaptation of walking patterns to assure stability in a wide range of walking situations.
Although the focus of our research is autonomy in the sense that the robot does not rely on human perception and decision making capabilities, we will integrate an on-board energy supply at a later time. This will make the robot physically autonomous and enable additional interesting experiments.
System Overview
To achieve fast and flexible walking, a thorough design of the mechatronical system is essential. All components of the robot must be seen as tightly coupled parts of a highly integrated system.
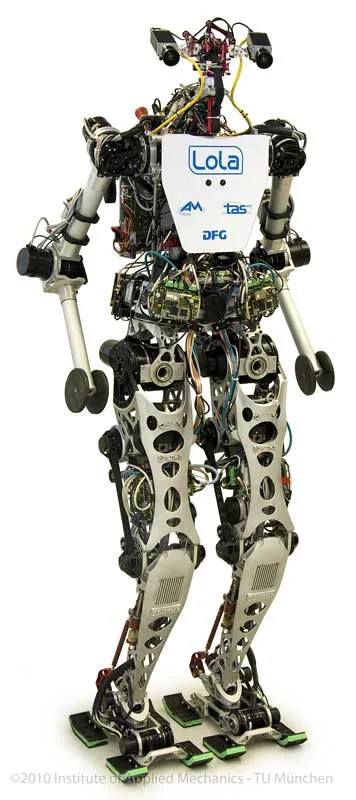
The humanoid robot LOLA is 180 cm tall and weighs approximately 55 kg. Its physical dimensions are based on anthropometric data. Fig. 1 shows a photograph of the robot. The distinguishing characteristics of LOLA are the redundant kinematic structure with 7-DoF legs, an extremely lightweight construction and a modular joint design using brushless motors. The mass distribution of the leg apparatus is improved to achieve good dynamic performance.
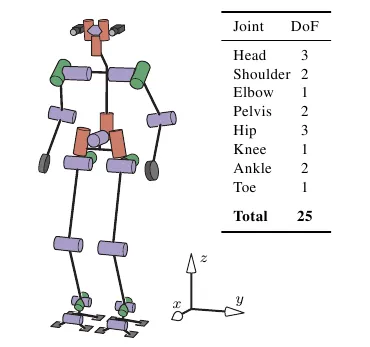
One of the most important questions regarding hardware design is how to choose the robot's kinematic structure in order to enable natural, stable and fast walking. Simulations and experiments have shown that additional redundant DoFs enable more natural and flexible walking patterns and extend the abilities of the robot in general. Fig. 2 shows the kinematic configuration with 25 actuated DoFs: the legs have 7 DoFs each, the pelvis has 2 and each arm 3 DoFs. A 3-DoF stereo camera head with pan and tilt axes and adjustable camera convergence angle is currently under development.
Besides the kinematic structure, further design goals can be defined to improve leg dynamics: (1) sufficient mechanical stiffness, (2) high center of mass, and (3) low moments of inertia of the leg links. To improve leg dynamics, new kinematic structures are developed for the knee and ankle joints, where heavier component parts (e.g. motors) are located close to the hip joint axis.
Since the robot's weight has a strong influence on global system dynamics, lightweight construction is of great importance. Our approach is to design major structural components as investment castings made from aluminum. In order to meet the weight and stiffness targets, design proposals are created by topology optimization. However, lightness of construction must be balanced with the demand for powerful drives necessary in order to achieve the desired torques and speeds at the required bandwidth. Therefore, actuator performance is increased carefully, using state-of-the-art motor, gear and sensor technology with high power density.
LOLA is controlled by an on-board PC mounted on the upper body and several local controllers carrying out low-level tasks, such as link position and velocity control, and sensor data processing. Joint controllers, sensors and the on-board PC form an intelligent sensor-actuator network with central controller. The new decentral components increase the system's performance from a technological point of view: similar to hierarchical structures in biological systems, sensor data are preprocessed decentrally and only relevant information forwarded to the central controller. Gait generation and stabilization run on the on-board electronics system without any support from outside except for power supply. An external PC is used only for monitoring purposes and to give basic operating commands if the robot is not connected to the vision system. Because of the high computational demand, image data processing is done on an external PC cluster.
Trajectory Generation and Walking Control
Increased walking speeds also require improved trajectory planning and stabilizing control. Reference trajectory planning is improved by taking into account the next three walking steps and using an improved robot model. A novel contact torque and center of gravity planning method based on constrained quadratic programming and spline collocation is used for calculating dynamically stable reference trajectories on-line.
On-line planning is combined with a stabilizing control system based on JOHNNIE's impedance control scheme. The system combines stabilization of global dynamics through contact force manipulation with hybrid position/force control in task space. Kinematic redundancies are resolved in the task space control module, leading to simple and effective use of the additional DoFs.
The planning and control system is implemented in C/C++ as a group of cooperating processes running on JOHNNIE's or LOLA's on-board PC under the real-time operating system QNX Neutrino.
In order to analyze the robot's dynamics and to evaluate and test new controllers we have developed a multibody simulation program. The program implements several different models of JOHNNIE and LOLA and provides interfaces to the controllers, which are source code compatible to the real-time system. An OpenGL based viewer for analyzing simulation and planning results is included as well. Fig. 3 shows LOLA walking in the simulation, with planned support polygons and trajectories superimposed.

Current State of the Project
We have completed work on Lola's hardware and conducted a number of walking experiments. In experiments Lola has walked at up to 3.34 km/h (video: .wmv (4MB)).
Together with the Autonomous Systems Technology Institute we are working on autonomous vision guided locomotion and have publicly demonstrated autonomous walking in unknown environments on the Hannover Messe 2010 (video: .wmv (4MB) .mp4 (12MB)).
We are also working on increasing the robustness against unknown obstacles, which is critical when walking in unknown environments. The robot is currently capable of walking over approximately 4cm high obstacles (video.wmv (14MB)).
Acknowledgments
This research is supported by the Deutsche Forschungsgemeinschaft (German Research Foundation, grants UL 105/29, UL 105-34/1 and UL 105/36-1). We would like to thank following companies for their generous support:
Links
Frequently asked questions about biped robots (Dr. Kajita, AIST)
AIST HRP-2 Humanoid Robotics Group
AIST Digital Human Research Center