Motion Cueing Algorithms
Driving Simulators
More and more car manufacturers possess their own driving simulators, which are under continuous development. They should allow the driver to dive into the virtual reality and to make it possible to simulate real world driving experiences.
The optical illusion of the driving scenes is created with a graphic system for visual display, which consists of projectors, high performance computers and a big screen. With this equipment, streets, cities and autobahns are created.
To generate the movements, especially the accelerations of the simulated vehicle, a motion platform is necessary. Usually Stewart-Gough Platforms are being employed for flight as well as for driving simulators. These parallel robots are assembled of six electromagnetic or hydraulic linear actuators, which connect the ground with an upper platform. The advantage of such a system is its ability to conduct movements in all six degrees of freedom (3 translational dof, 3 rotational dof). Mounted on the upper platform is the replication of a car interior, the mock-up. The passenger, sitting inside the mock-up, steers the simulated vehicle like in a normal car by the steering wheel, break and acceleration pedal.
In contrast to flight simulation, driving simulation is not used as a learner’s tool to train pilots, respectively drivers, but as a developing tool for the car industry. It allows obtaining data fast and efficient under constant test conditions.
There is a wide range of possible applications for driving simulation. It is used to analyse driving behaviour in risky situations, or to test new control elements, for example. Further topics are:
- Reduction of developing times
- Evaluation and tuning of driver assistant systems
- Checking safety concepts
- Human factors
- Handling of information systems
- Driving behaviour with distractions
- Human perceptions
- Etc.
To acquire comparable and meaningful results it is essential that the simulation, besides the visual presentation of the environment, makes it also possible to imitate car movements.
Motion Cueing Algorithms
Accelerations, which exert forces on the driver’s body, are so called motion cues. They should convince the passengers that they are driving in a real car. The algorithms, which are responsible for generating these cues, are named motion cueing algorithms.
Most existing flight simulator systems are developed and optimized mainly for the specific dynamic behaviour of passenger aircrafts. All manoeuvres are carried out slowly in contrary to vehicle movements. Driving on a road within cities or on highways produces completely different acceleration profiles. Therefore it is necessary to critically review motion cueing schemes for flight simulation currently in use. New approaches to the challenge of a realistic driving simulation have been investigated.
Technical limitations are making it necessary to find a strategy to take these restrictions on platform movements into account and at the same time considering the human perception of motion. The limited workspace, for example, makes it impossible to generate long lasting acceleration cues. To avoid this disadvantage most algorithms are based on three principles. The first one is the separation of the frequency content of the input acceleration signal in a high frequency part and in a low frequency part.
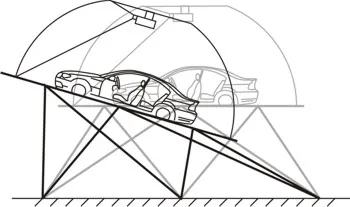
The high frequency signal is then being filtered by the washout, which adds a drift to the executed motion, so that the platform is always pulled back to the centre of the work space. The low frequency signal is transformed by the tilt-coordination into an angle that slowly tilts the platform and the visual scene, so that gravitational vector differs from the body z-axis. The part of the vector that is aligned with the platform axis in x- and y-direction creates the illusion of sustained accelerations.
However, these methods for a better motion cueing are linked to false cues that are false platform movements, which disagree with the experience of real car driving.
These contradictory motion cues could provoke simulator sickness. If the simulated platform movement is not in accord with the visual car movement, then a sensory conflict emerges. The body responds, among others, with dizziness and disorientation. Therefore, it is important to parameterize the algorithms accordingly, in order to circumvent these effects.
Project objective: Optimization of the movement behaviour of the dynamic driving simulator at BMW
Several motion cueing algorithms have been developed and designed, especially for the use in driving simulations. Technical limitations and the human motion perception have been taken into consideration. The driving simulator at BMW has being used for implementation and testing of the algorithms. At the end of the project, the simulator was able to present enhanced driving dynamics to the driver.