Reduction of Contact Forces of a Rubbing Rotor by Active Control
The control of rubbing phenomena in rotating machinery is of practical interest for the prevention of structural damage since there is the possibility of serious failures up to complete destruction of the system if the impact forces are not taken under control.
Rotor-to-stator rubbing in rotating machinery is a secondary malfunction resulting from a primary cause which perturbs the machine operational conditions, such as unbalance or assembly misalignments. In rotating machines, increased efficiency is often achieved by tightening operation clearances, and so, if the machine is not operating under normal conditions, the stationary and rotating elements are in danger of coming in contact. Auxiliary bearings or back up bearings are used in rotor systems to prevent direct contact between rotor and casing when the rotor response is too large.
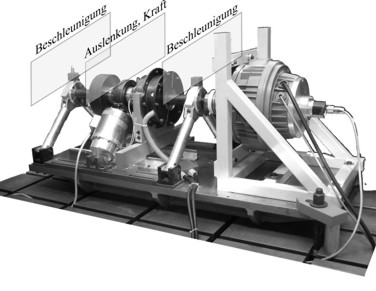
In this research project a new concept to reduce the severeness of rubbing phenomena in rotating machinery is investigated. Therefore a control concept for an active auxiliary bearing has been developed. The auxiliary bearing is attached to the foundation via two powerful electromagnetic actuators, which have been developed at the Institute of Applied Mechanics, TU Munich.
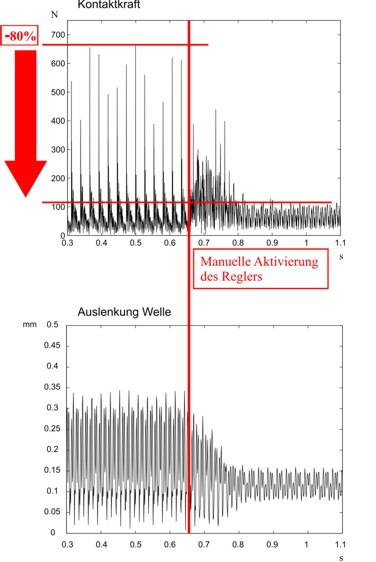
A two phase feedback control, which has been designed using numerical simulations, assures a smooth transition from the state of free rotor motion to a permanent contact in the desired state ‘full annular rub’. The first experimental results show, that the applied control concept leads already to a drastic reduction of the impact forces and a stabilization of the rotor system.
For industrial application the activation and deactivation of the control system can be operated fully automatically. The developed control of the auxiliary bearing is able to reduce the load and the noise of the whole system significantly, which increases its life-span and of course its safety as well.
The future research work will focus on the development of an adaptive control which is able to compensate measurement errors. In addition, there are still uncertainties relating to the friction coefficient, which has a great influence on the process of rubbing. The measurements will also be expanded on supercritical rotors. Furthermore there is the possibility to expand the control system to take influence on torsional vibrations.