Surgical assistance systems for single-port-technologies
In order to keep a patient’s trauma during surgical operations as low as possible, minimally invasive surgery (MIS) has been successfully established in the past decades. The development of laparoscopy, where access to the abdominal cavity is gained via rigid endoscopes was a decisive breakthrough in this field of research.
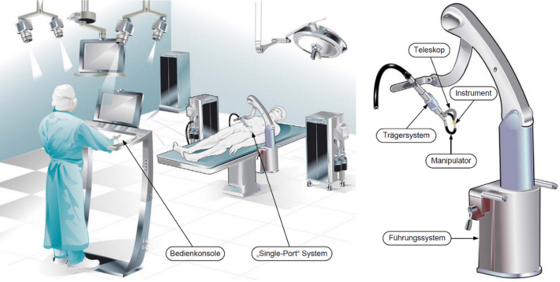
However, standard laparoscopic procedure still leads to multiple incisions, i.e. to oppose instruments or to insert the camera. A new approach to minimize damage to healthy tissue and thereby shorten the patient’s recovery time allows operations in the abdomen through a single incision. Several instruments are bundled within a single shaft or arm (single port) while each single instrument remains independent. This technique thus can take advantage of the same accesses as used in endoscopic surgery. At the same time it is possible to switch from one single leading arm to multiple operating arms once the instrument is located at the situs. Therefore the dexterity will increase significantly and even opposing the instruments can be established.
The overall goal of this DFG-funded project is to develop an active single-port-system within in an interdisciplinary and close cooperation of engineering and medical disciplines, i.e. medical technology, applied mechanics, robotics, visceral surgery and gastroenterology. At the end of this project, a prototype consisting of a flexible carrier system as well as flexible manipulators will be designed.
The core task for the Institute of Applied Mechanics is to investigate and develop a model whose states can constantly be compared to physical systems. Due to insufficient sterilization it will be necessary to place the drives outside the abdominal cavity. As a result modeling friction-dependence will play an important role when setting up the model and is the only way to guarantee for the system’s precise control.