Objective of the Collaborative Research Centre SFB453 on "High-Fidelity Telepresence and Teleaction" is to provide the possibility to a human operator of being present at an unreachable remote environment (telepresence). The operator is not only passive but also can actively manipulate objects at the remote location (teleaction). High-Fidelity is achieved, if the human operator can not distinguish, if his impression and his received feedbacks come from reality or from a technical device. Besides the visual and auditive sensorial feedback, the haptic feedback is important for the immersiveness.
There are effects which are disturbing the telepresence system and thus the immersiveness of the operator. The disturbing effects have to be compensated to ensure the performance of the teleaction. Teleoperations using the internet or satellite connections for communication have to deal with time delays in the transmission. This can result in instabilities of the control loop, consisting of the human operator and the teleoperator.
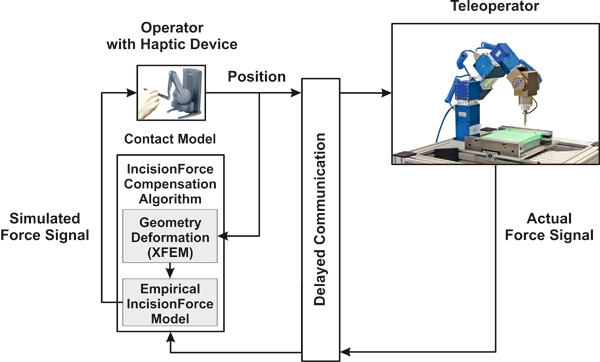
In the project M7 "Force and Motion Prediction in Teleoperations with Soft Contacts" the time delays are compensated by using prediction. The telepresence system is extended with a motion prediction for the operator's motion and also with a force prediction for the measured forces of the teleoperator.
The force prediction is realized with model-based algorithms which are capable of considering different physical effects such as inertia, friction, rigid and soft body or medical incision. For identification of the model parameters, the measured forces from teleoperator are used. The parameterization is updated at runtime. The evaluation of the force model is done in real-time.