EcoWalk - Biorobotic Analysis of the Swing Leg Catapult
DFG 3991/2 - 1 in cooperation with the Dynamic Locomotion Group of the MPI-IS
The project EcoWalk aims at developing a functional description and technical realization of the swing leg catapult in human walking. The swing leg catapult describes an effect in human walking arising shortly before the hind leg leaves the ground to swing forward. An impulsive power output at the ankle joint is observed propelling the leg forward into swing, like a catapult launching to fire its projectile (Lipfert, 2014). We want to develop a functional understanding of the catapult by combining two approaches: evolving a neuromuscular simulation model and building a robotic leg. The functional understanding of the catapult mechanism bears great potential to improve prostheses, legged robots, and gait rehabilitation devices as it is assumed to contribute to the high efficiency and fundamental leg dynamics of human walking.
The project is partitioned into two subprojects: The functional aspects will first be investigated in a computer model (Subproject 1, TUM) and subsequently realized in a biorobotic system (Subproject 2, MPI).
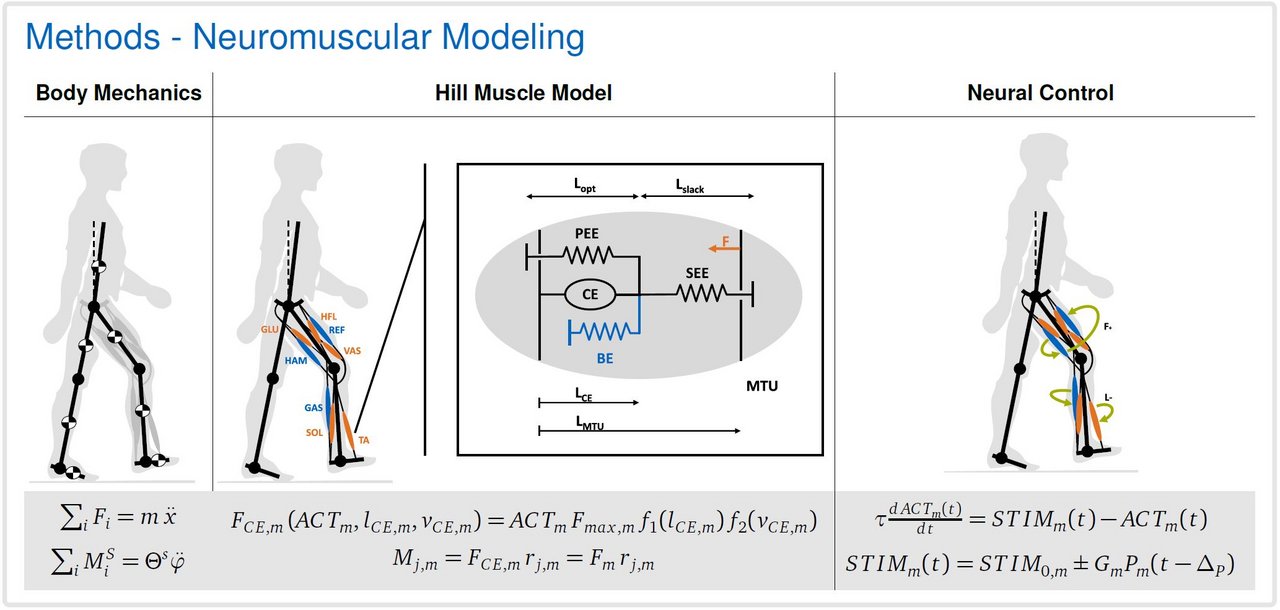
At TUM we investigate the fundamental functionality of the observed catapult mechanism based on kinematic, kinetic and energetic properties using neuromuscular models of human walking (see Geyer 2010 & Geyer 2019).
The MPI subproject aims at realizing the identified mechanisms and control strategies in a biorobotic system of the human leg to verify findings from the computer model and show feasibility of the catapult in technical systems.
Walking Trial with Neuromuscular Model (Geyer 2010)
Referenzen
Geyer, Hartmut; Herr, Hugh (2010): A muscle-reflex model that encodes principles of legged mechanics produces human walking dynamics and muscle activities. In: IEEE Transactions on Neural Systems and Rehabilitation Engineering : a Publication of the IEEE Engineering in Medicine and Biology Society 18 (3), S. 263–273. DOI: 10.1109/TNSRE.2010.2047592.
Geyer, Hartmut; Seyfarth, André (2019): Neuromuscular Control Models of Human Locomotion. In: Ambarish Goswami und Prahlad Vadakkepat (Hg.): Humanoid robotics. A reference. Dordrecht: Springer-Verlag (SpringerLink), S. 979–1007.
Lipfert, Susanne W.; Günther, Michael; Renjewski, Daniel; Seyfarth, André (2014): Impulsive ankle push-off powers leg swing in human walking. In: Journal of Experimental Biology 217 (8), S. 1218–1228. DOI: 10.1242/jeb.097345.
The project is funded by the Deutsche Forschungsgemeinschaft (DFG) - Projektnummer 449427815 "EcoWalk - Biorobotische Analyse des Schwungbeinkatapults". https://gepris.dfg.de/gepris/projekt/449427815
Wutte, Veronika: Neuromuscluar Hopping Controller of a Three- Segmented Human Model with Free Trunk. Semester thesis, 2024 more…BibTeX
Full text (mediaTUM)
2023
Köhnke, Lennart: Simulation Study on Planning and Control for Bipedal Robot Jumping. Bachelor thesis, 2023 more…BibTeX
Full text (mediaTUM)
Wenzler, Simon: Development and Validation of Foot Ground Contact Models for predictive Neuromuscular Simulations. Master thesis, 2023 more…BibTeX
Full text (mediaTUM)
2022
Buchmann, Alexandra; Kiss, Bernadett; Badri-Spröwitz, Alexander; Renjewski, Daniel: Power to the Springs: Passive Elements are Sufficient to Drive Push-Off in Human Walking. In: Robotics in Natural Settings. Springer International Publishing, 2022 more…BibTeX
Full text (
DOI
)
Full text (mediaTUM)
Buchmann, Alexandra; Kiss, Bernadett; Renjewski, Daniel; Badri-Spröwitz, Alexander: Functional Analysis of the Swing Leg Catapult in Human Walking. IFToMM D-A-CH Konferenz 8. IFToMM D-A-CH Konferenz 2022: 24./25. Februar 2022, 2022, Online-Konferenz more…BibTeX
Full text (
DOI
)
Full text (mediaTUM)
Kiss, Bernadett; Buchmann, Alexandra; Renjewski, Danile; Badri-Sprowitz, Alexander: Questions around the catapult mechanism in human legged locomotion. Annual Meeting of the SOCIETY FOR INTEGRATIVE AND COMPARATIVE BIOLOGY (SICB) , 2022 more…BibTeX
Kiss, Bernadett; Gonen, Emre Cemal; Mo, An; Badri-Sprowitz, Alexander; Buchmann, Alexandra; Renjewski, Daniel: Gastrocnemius and Power Amplifier Soleus Spring-Tendons Achieve Fast Human-like Walking in a Bipedal Robot. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2022 more…BibTeX
Full text (
DOI
)
Full text (mediaTUM)
Reichelt, Charlotte: Towards Applying Human Balancing Methods to Control a Lower Limb Exoskeleton. Bachelor thesis, 2022 more…BibTeX
Full text (mediaTUM)
Reinbold, Nora: Use of a Neuromuscular Model to Study Single Muscle Contributions during the Ankle Push-Off in Human Walking. Master thesis, 2022 more…BibTeX
Full text (mediaTUM)
Sahli, Mohamed Fares: Simulating the Effects of Age-Related Deficits on the Swing Leg Catapult in Human Walking. Semester thesis, 2022 more…BibTeX
Full text (mediaTUM)
Streich, Konrad: Experimental Validation of a Ground Contact Model for Human Walking. Semester thesis, 2022 more…BibTeX
Full text (mediaTUM)