System architecture and modular design of robot-like systems using multidimensional characteristic diagrams
Research Topic
| Short Title | DSL4RAS |
| Start of Project | Q2/2021 |
| Funding | DFG-Nr. 461993234, STA 1198/21-1 German Research Foundation, DFG |
| Project Partners | Institute of Automation and Information Systems, AIS, TU Munich Laboratory for Product Development and Lightweight Design, LPL, TU Munich |
| Contact | Dr.-Ing. M. Otto |
Project Description
To ensure profitability in industrial production and thus survive in a highly competitive market environment, robotic-like systems (RAS) must be efficiently developed for both low-cost and high-end applications. The Robotics and Automation Society of the IEEE defines robotics as follows: "Robotics is here defined to include intelligent machines and systems used, for example, in space exploration, human services, or manufacturing." A narrower definition of a robot is provided by ISO 8373, which defines a robotic system as an automatically controlled and programmable manipulator. The project addresses robot-like systems of both definitions. In accordance with the first further definition, the project considers machines and systems that do not necessarily only contain manipulators and where, for example, the parameterization of synchronized or clocked master-slave multi-drive systems is not very robust, so that subsequent re-parameterizations are often necessary. The behavior of robot-like systems depends, for example, on factors such as humidity, temperature or temperature gradients in the production hall, and wear of the drive components involved, and possibly also of the entire mechatronics.
Within the scope of the research project, a cross-disciplinary description language (DSL4RAS) for the software and hardware properties of robotic drive components is to be defined. This should integrate existing description approaches of mechanics, electronics and software and thus make it possible to systematically and comprehensively capture all relevant influences on component and system behavior, especially for robot-like systems, and make them accessible for design. This should enable a top-down development of the system architecture with precise formulation of requirements for subsystems and their systematic breakdown to involved components. As a result of this process, comprehensive and multidisciplinary specifications for modules can be derived, which substantiate all relevant technical aspects with requirements sufficient for target fulfillment and thus modularize the development of components, i.e. make it separable.
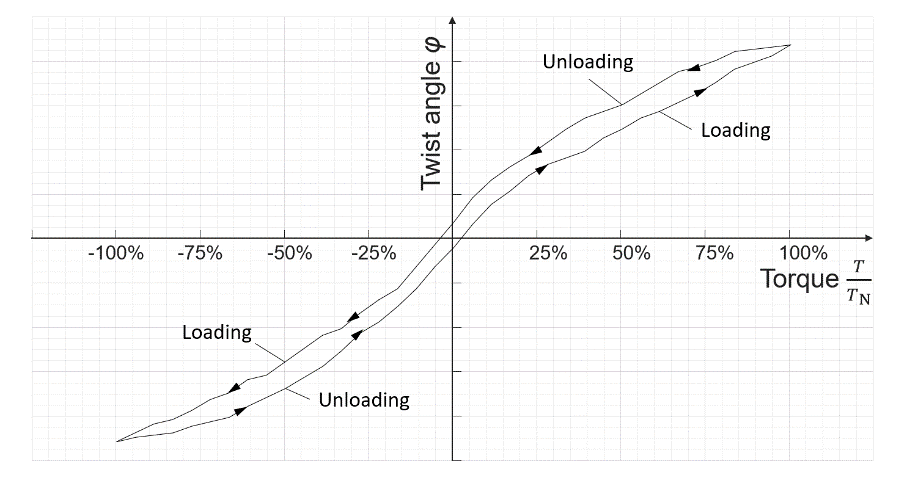
By means of a holistic system description, DSL4RAS is to provide the plant control system with comprehensive information a-priori. Modular assemblies can be stored with multidimensional characteristic diagrams that map the effects of environmental influences and load-historical effects, such as changing backlash or friction. In this way, the overall system behavior can be reliably predicted even in the event of a changed environment or changed behavior of individual components and either automatically adjusted as well as possible - even during operation - or considered accordingly during development. The need for readjustment can thus be reduced to a minimum. A prerequisite for this is the precise, model-based description of all components used.