Systemarchitektur und modulares Design roboterartiger Systeme mittels multidimensionaler Kennfelder
Forschungsthema
| Kurztitel | DSL4RAS |
| Projektbeginn | Q2/2021 |
| Förderung | DFG-Nr. 461993234, STA 1198/21-1 Deutsche Forschungsgemeinschaft, DFG |
| Projektpartner | Lehrstuhl für Automatisierungstechnik und Informationssysteme, AIS, TU München Lehrstuhl für Produktentwicklung und Leichtbau, LPL, TU München |
| Kontakt | Dr.-Ing. M. Otto |
Projektbeschreibung
Um in der industriellen Produktion Rentabilität sicherzustellen und so in einem hochkompetitiven Marktumfeld bestehen zu können, müssen roboterartige Systeme (RAS) sowohl für den Low-Cost- als auch für den High-End-Bereich effizient entwickelt werden. Die Robotics and Automation Society der IEEE definiert Robotik wie folgt: „Robotics is here defined to include intelligent machines and systems used, for example, in space exploration, human services, or manufacturing“. Eine engere Definition eines Roboters liefert die ISO 8373, nach welcher ein roboterartiges System als automatisch gesteuerter und programmierbarer Manipulator verstanden wird. Das Vorhaben adressiert roboterartige Systeme beider Definitionen. Entsprechend der ersten weiteren Definition werden im Projekt Maschinen und Anlagen betrachtet, die nicht notwendigerweise nur Manipulatoren beinhalten und bei denen beispielsweise die Parametrierung von synchronisierten oder getakteten Master-Slave-Mehr-Antriebssystemen wenig robust ist, sodass häufig nachträgliche Neu-Parametrierungen erforderlich sind. Das Verhalten roboterartiger Systeme ist beispielsweise abhängig von Faktoren wie der Luftfeuchtigkeit, der Temperatur bzw. Temperaturgradienten in der Produktionshalle und dem Verschleiß der beteiligten Antriebskomponenten, ggf. auch der gesamten Mechatronik.
Im Rahmen des Forschungsprojekts soll eine disziplinübergreifende Beschreibungssprache (DSL4RAS) für die Soft- und Hardware-Eigenschaften von Robotik-Antriebskomponenten definiert werden. Diese soll bestehende Beschreibungsansätze der Mechanik, Elektronik und Software integrieren und somit ermöglichen, alle relevanten Einflüsse auf Komponenten- und Systemverhalten speziell für roboterartige Systeme systematisch und umfassend zu erfassen und der Auslegung zugänglich zu machen. Dies soll eine Top-Down-Entwicklung der Systemarchitektur mit präziser Formulierung von Anforderungen an Subsysteme und deren systematisches Herunterbrechen auf beteiligte Komponenten ermöglichen. Als Ergebnis dieses Vorgangs lassen sich umfassende und multidisziplinäre Lastenhefte für Module ableiten, die alle relevanten technischen Aspekte mit für die Zielerfüllung hinreichenden Anforderungen belegen und somit die Entwicklung von Komponenten modularisieren, also trennbar machen.
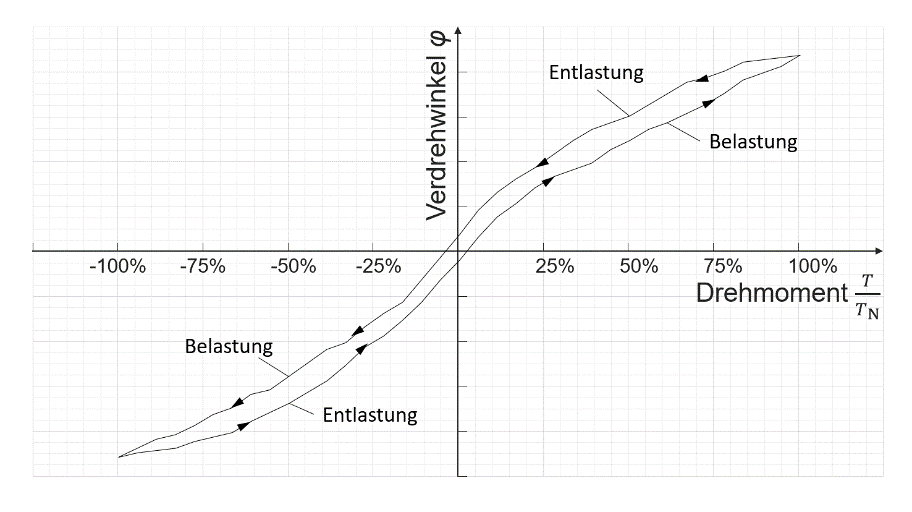
Durch eine ganzheitliche Systembeschreibung soll in DSL4RAS die Anlagenregelung a-priori mit umfassenden Informationen versorgt werden. Modulare Baugruppen können mit multidimensionalen Kennfeldern hinterlegt werden, die die Auswirkungen von Umgebungseinflüssen und lasthistorischen Effekten, wie sich veränderndes Spiel oder Reibung, abbilden. So kann das Gesamtsystemverhalten auch bei geänderter Umgebung oder verändertem Verhalten einzelner Komponenten zuverlässig vorherbestimmt und entweder automatisch – auch während des Betriebs – möglichst gut eingestellt oder während der Entwicklung entsprechend berücksichtigt werden. Die Notwendigkeit einer Nachjustierung kann damit auf ein Minimum reduziert werden. Eine Voraussetzung dafür ist die genaue, modellbasierte Beschreibung aller verwendeten Komponenten.