DFG-Project FoldRob
Project title
Formalized design methods and component-based fundamentals for the development of folding-based robots.

Goal
Verifying if:
- Folding-based robot structures can achieve higher stiffness and higher accuracy with lower mass than classical robots due to plate- and line-shaped components (structural parts, joints).
- Folding-based parallel robot structures have a larger workspace with the same stiffness compared to classical systems
- The development of specialized synthesis strategies for convolution-based robot structures enables a task-oriented and requirement-oriented design
Contact
M.Eng Markus Huber (wiss. Mitarbeiter)
Application
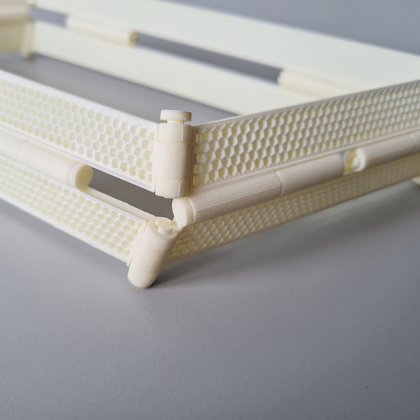
Development of robotic structures with increased stiffness and reduced weight
Research topic
Formalized design methods and component-related fundamentals for the development of convolution-based robots
State of the art
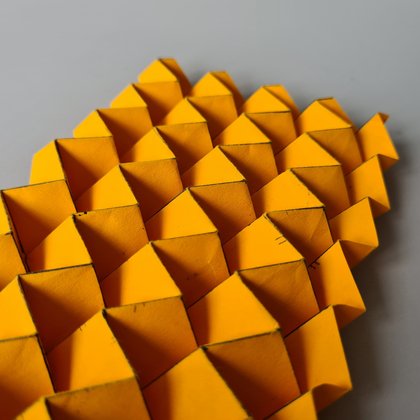
Origami-based folding structures are already used in many areas, such as the design of furniture or the folding of solar panels. In robotics, the application of such structures is still rare.
Drawbacks of the State of the Art
Classic robot structures made of a homogeneous material have a certain stiffness. To achieve higher precision under load, the stiffness of the structure has to be increased. Normally, this is done by adding more material. However, this additional material increases the weight of the structure and thus reduces the working speed of the robot.
Concept
Replacing classic robot modules with lightweight plates and joints with folding-based joints
Current Results
Automatik detektion of the foldability of a strukture and the calculation of the reqired folding-angles