A new glove monitoring system used to quantify tremor and rigidity in Parkinson’s disease during deep-brain stimulation surgery
Design-engineering bachelor thesis (Semesterarbeit) supervised by Houde Dai and Tim Lüth.
Problem description

Deep brain stimulation (DBS) is a surgical procedure used to treat a variety of disabling neurological symptoms - most commonly the debilitating symptoms of Parkinson’s disease (PD), such as tremor, rigidity, stiffness, slow movement, and walking problems. Tremor is a crucial symptom in PD, which being generally judged from hand tremor, with certain feature frequency range (3.5 Hz to 7.5 Hz) and amplitude (speed and range).
During the surgery, in present no special instrumental measuring method is used to detect the surgery’s immediate effect. But the surgeons need to know clearly the exact position which achieves the best results. Currently assessment of resting tremor (RT) in clinic is mainly based on subjective methods or EMG. Although administered under clinician observation, these largely subjective scales lack validation against actual RT amplitude. Furthermore, the coarse resolution of the ratings is insufficient for assessing minute changes in RT severity. Finally, the extent of inter-clinician and inter-subject rating variability is unknown.
Thus it is necessary to develop a monitoring system able to quantify tremor and rigidity in Parkinson’s disease during deep-brain stimulation surgery, and it is able to make accurate measurement in real time.
Accelerometers and gyroscopes have been used to detect and quantify tremor and hypokinesia in PD patients. Also other kinematic sensors, such as force sensors, have been used in detection and quantification of dyskinesia. With 3D MEMS accelerometer and gyroscope, the hand movements can be detected in real time. Through signal processing, the parameters of hand tremor and bradykinesia can then be extracted.
Tasks
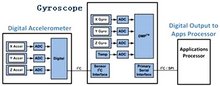
The goal of this project is to develop a measuring system for quantification of hand tremor and bradykinesia in the Parkonson’s disease during deep-brain stimulation surgery. A glove with several accelerometers and gyroscopes is used to measure the hand’s motion. A pressure sensor is used to measure the level of hand rigidity. Further signal processing is realized on a PC using Matlab, LabVIEW or VC++.
The project can be split into two parts, i.e. hardware and software development:
The tasks in hardware development include:
· Designing and building a mechanical prototype with small size and high comfort.
· Realization of real-time data transmission via USB interface and RF module.
· Programming MCU for sensors control, data acquisition and preprocessing.
For the hardware development, the above 3 tasks should be included in a single thesis.
Delimitation
The specified tasks have to be completed within a tight schedule, but based on existing work.
Application
The final system can also be used for other data acquisition systems with high speed, real-time and wireless interface. Also in the fields of sports, computer games and robots, MEMS accelerometers and gyroscopes play a significant role.
Expectation
The following results are expected:
· Detailed documentation of each step.
· Accomplishing the tasks in proper order, and achieve an improvement above the existing platform.
· When a target is not completed, then the reasons should be justified. Achieving or not achieving the target will be investigated and documented, so that sound conclusions can be made about the suitability or necessary changes.
Required qualification
Familiarity with Catia, Eagle and C programming based on AVR MCU is required.
Course of action
1) Familiarization with the existing datasheets, codes and hardware of this project.
2) Building new mechanical and electric circuit prototypes of sensor cases attached to wrist and fingers.
3) Development of USB/IIC/SPI bridge for data transmission via USB interface.
4) Wireless data transmission implementation (NanoLOC AVR Module).
5) Performance of tests in lab and hospitals.
6) Evaluation and documentation of results.
7) Writing of the thesis.
Expected results
1) Realization of a novel glove monitoring system used to quantify tremor and rigidity in Parkinson’s disease during deep-brain stimulation surgery.
2) System documentation.
3) Bachelor thesis (Semesterarbeit).
References
· Padraig E. O’Suilleabhain, and Jsoeph Y. Matsumoto, Time-frequency analysis of tremors; Brain (1998), vol. 121, pp. 2127-2134.
· B. Mariani, C. Hoskovec, S. Rochat, C. Büla, J. Penders andK. Aminan, “3D gait assessment in young and elderly subjects using foot-worn inertial sensors,” Journal of Biomechanics (2010), vol. 43, pp. 2999-3006.
· Juan A.Gallego, E. Rocon, J. O. Roa, Juan C. Moreno and J. L. Pons, “Real-Time Estimation of Pathological Tremor Parameters from Gyroscope Data,” Sensors(2010), vol. 10, pp. 2129-2149.
· Arash Salaian, H. Russmann, C. Wider, P.R.Burkhard, F. J. G. Vingerhoetes and K. Aminian, “Quantification of Tremor and Bradykinesia in Parkinson’s Disease Using a Novel Ambulatory Monitoring System,” IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING(2007), vol. 54, pp. 313-322.