Introduction
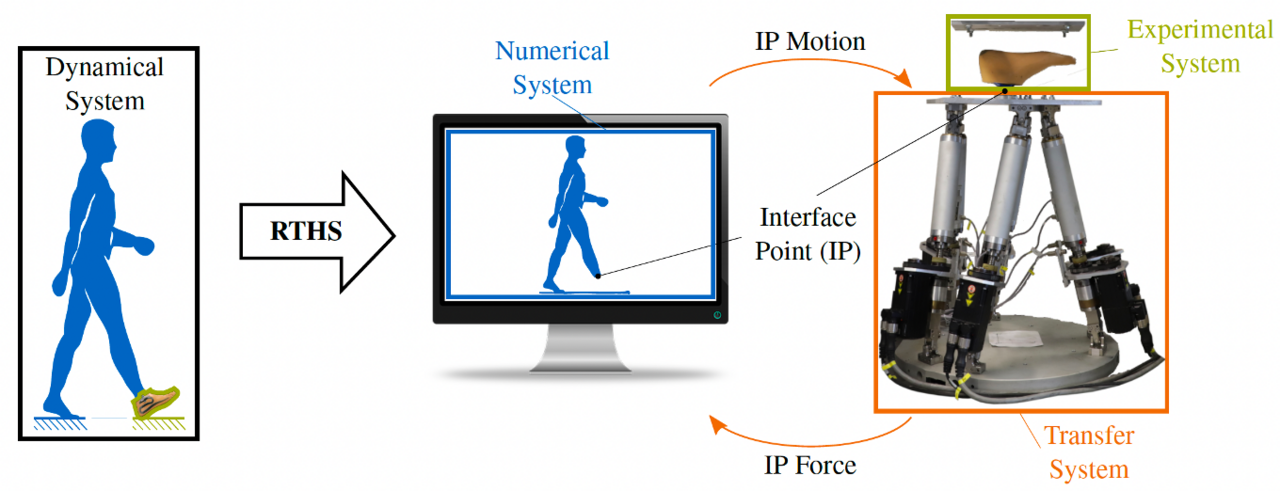
Real-Time Hybrid Substructuring (RTHS) is a research topic that combines all of our competences: Numeric, Robotics and Experimental Dynamics. It is also often referred to as Hardware-in-the-Loop (HiL) on mechanical level. Similar to other substructuring methods, RTHS is used to analyze dynamical systems. In RTHS (see in the figure), the dynamical system that is being investigated is split into an experimental part that is tested on a test bench and the rest of the system that is modeled and simulated numerically. Both components are coupled in real-time by exchanging force and displacement information. The parts of the dynamical system where numeric models are available are usually simulated in the numerical simulation, while the components where the dynamic behavior is largely unknown are tested experimentally. The actuator (Stewart Platform in the figure) applies the displacements that are calculated in the numerical simulation to the experimental part. In RTHS, the goal is to couple the simulation and experiment ideally, in order to have a high fidelity test result. However, in reality, the actuator control is not infinitely fast and therefore actuator control is a large research field in RTHS.
Current Projects
A key question in the development of foot prostheses is how a prosthesis influences the gait of the patient. Thereby, it could be answered how a human adapts to a specific prosthetic foot and whether it takes more energy effort or muscle tension to walk stably. We consider the interplay between the human and prostheses as the dynamical system. Our aim is to test prosthetics realistically, objectively and safely without having a patient in the loop. Hence, we set up an RTHS test for prosthetic feet. Therein, we simulate the human numerically and mount the prosthesis on the test bench. We use gait models known in kinesiology for the numerical simulation and couple them to the prosthesis using RTHS.
Mechanically speaking, the instant of touch down during gait involves contact dynamics. In many engineering applications, contact leads to undesired dynamic behavior. Investigating dynamic systems with contact using RTHS suffers from stability using currently available methods to couple the parts in RTHS. Therefore, we expand methods for RTHS to enable stable and safe coupling when dynamical systems with contact are investigated in the DFG project "Robust Control and Fidelity Assessment of Real-Time Hybrid Substructuring of Contact Problems" (project number 45081414). Conference talks can be found on our YouTube channel and tutorials/example code of the proposed methods can be downloaded here.