Automated Driving and Mobility Systems
Group leadership: Niklas Grabbe und Verena Pongratz
members: Anna Theresa Eckl, Yuchen Liu, Elena Malaika Nkusi, Siyi Dai, Tianyu Tang & Jens Jacobs
contact: automateddriving.lfe@ed.tum.de
Projects: STADT:up, MiRoVA, Salsa (MAN), i4Driving
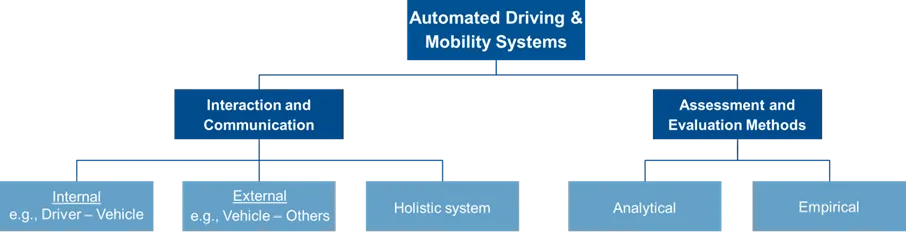
Automated driving promises to increase traffic safety, provide a high level of driving comfort, and improve traffic efficiency. In order to achieve these goals, it is essential to develop automated driving following a human-centered approach. Research on highly usable interaction concepts and their design allows to adequately meet user needs and assure high acceptance and safe and comfortable use. The main focus of the research group is therefore on the interaction and communication between human and vehicle covering both internal (passenger(s) – vehicle) and external (vehicle – other road users) interaction as well as interactions in the holistic system. Thus, aspects of cognitive ergonomics as well as anthropometrics play an important role and are addressed by scientists with both engineering and psychological background. The “Automated Driving and Mobility Systems” group is not only working on design of interaction and communication of future automated vehicles, but also on the suitability and requirements of certain assessment and evaluation methods, e.g. Wizard-of-Oz vehicle or augmented reality. In general, we make use of various tools: User-centered design methods like workshops and small-scale user studies are used alongside classical driving simulator, virtual reality and on-road studies, as well as agile methods like design thinking or methods for the development of future scenarios. In addition, systemic methods and models are used to model complex sociotechnical interactions. With its broad knowledge and research efforts, the group can also contribute to standardization efforts.
While partially automated vehicles are already available on the market, the evolutionary development of such systems of higher levels of automation continues. The changing role of the driver to a (temporary) passenger with highly and fully automated driving alters requirements for internal human-machine interfaces (HMIs) and opens up completely new possibilities for the design of controls and interior design. In addition, the need for safe and comfortable transitions between manual and automated driving (and vice versa) requires scientific investigation. For this purpose, numerous takeover studies have been conducted in the last decade. While these studies have been mainly limited to highway driving, the transferability of such results on rural roads and cities needs to be addressed. In order to benefit from engaging in non-driving related activities (NDRAs), it is necessary to investigate how they can be planned appropriately and what restrictions users are willing to accept (e.g., driving time extension). Additionally, with an increasing market penetration of automated vehicles, the question of long-term effects arises for both usage behavior of passengers and behavior of surrounding road user. In this context, it is important to consider how the misuse of automated vehicles can be prevented. Individual user differences could further increase the need for adaptive HMIs. Furthermore, the activities of this research group put a strong emphasis on the acceptance of automated driving functions.
However, not only the communication between passenger and vehicle changes, but also between vehicle and other road users e.g., pedestrians, cyclists, and car drivers. With the passenger potentially being out of the loop, effective interaction via such external or dynamic HMIs is of great importance, especially in traffic scenarios where a clear traffic regulation is missing. In particular, further research is needed on how to address specific road users with a large number of potential addressees in dense traffic.
The comprehensive introduction of autonomous vehicles remains a vision. Complex situations in particular, such as driving in city centers, represent a major challenge in the development of systems that has not yet been fully resolved. In order to accelerate the introduction of automated vehicles, teleoperated driving is becoming increasingly popular. The basic idea is for the highly automated vehicle to be supported remotely by a human operator when it reaches its functional limits or potential functional errors occur. The temporary support provided by the operator ultimately enables the vehicle to continue the automated journey. In addition to the design of the teleoperator workstation, the Chair of Ergonomics is primarily concerned with work organization issues such as the support relationship between the teleoperator and the vehicle and the distribution of roles and tasks. Training and education concepts are also to be researched in the future.
Since the transformation of individual automobile traffic as well as the commercial vehicle industry is being driven not only by the development of automated driving, but also by the need for energy-efficient vehicles and the introduction of new mobility or business concepts (e.g., shared mobility), the “Automated Driving and Mobility Systems” research group is in close dialogue with the research groups on “Energy Efficiency and Climate Comfort” and “New Mobility”. In considering automated vehicles as part of the overall traffic system, the research group also aims to further investigate the extent to which automated vehicles can contribute to traffic safety.
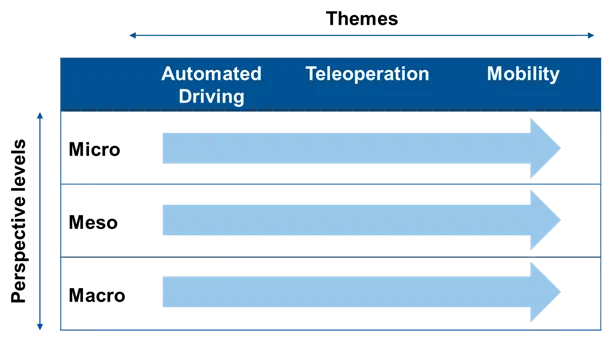
In general, the research group focuses on three major topics: Automated Driving, Teleoperation and Mobility. These topics are investigated at different levels of perspective: from the micro level with local interactions, e.g. between driver and vehicle, to the macro level with more global interactions in the overall system.