Roboter
Der Lehrstuhl für Ergonomie verfügt über verschiedene Robotersysteme unterschiedlicher Einsatz- und Untersuchungsgebiete. Dabei erstreckt sich das Portfolio von ortsfestem Industrieroboter bis hin zu hochdynamisch mobilen Robotersystemen.

Autonomer Roboter: Turtlebot 2i



Mehr Informationen
Der Turtlebot 2i ist eine mit ROS programmierbare Forschungsplattform. Er besteht aus einer Kobuki Basis, einem Intel NUC Prozessor und ist ausgestattet mit einer Orbbec Astra RGB-D Tiefenkamera. Zusätzlich steht dem Lehrstuhl die Astra Bodytracking SDK zur Verfügung. Im Zuge erster Arbeiten wurde diese Plattform mit human-aware navigation ausgestattet. Der Roboter kann mit Hilfe von SLAM Technologie autonom am Lehrstuhl für Ergonomie variierbare Positionen anfahren. Im Gegensatz zu den anderen am Lehrstuhl eingesetzten Robotermodellen bietet dieses Modell die Möglichkeit Bewegungsmuster in autonome Fahrverhalten zu integrieren. Ein solches Bewegungsdesign wurde auch auf der automatica sprint 2021 Messe vorgestellt (siehe Video).
Mobiles Robotersystem: Parallax Stingray
Der Parallax Stingray ist aufgrund seiner mittleren Größe (280 mm x 330 mm x 140 mm, ca. 1 kg) geeignet für eine Vielzahl von Untersuchungen, insbesondere Untersuchungen zu robotischem Bewegungsverhalten. Das System kann gegenwärtig entweder über Programmierung eines Arduino Mikroprozessors oder die Softwareumgebung Unity in Kombination mit Bewegungserkennung der HTC Vive Hardware angesteuert werden. Der agile Roboter verfügt über den größtmöglichen Spielraum zur Bewegungsgestaltung. Durch zwei getrennte Motoren werden die vorderen Räder angetrieben. Hinten verfügt er über ein omnidirektionales Rad, durch das auch auf der Stelle drehen möglich wird. Er kann sowohl präzise weiträumige Trajektorien, als auch Bewegungsmuster auf engem Raum darstellen. Es kann eine maximale Beschleunigung von ca. 1,2 m/s2 und eine maximale Geschwindigkeit ca. 2 m/s erreicht werden.


Der Parallax Stingray wurde beispielsweise für eine Studie zur Untersuchung zum Führen von Menschen verwendet. Dabei wurde großer Wert auf das Erreichen menschlicher Bewegungsparameter in Bezug auf Beschleunigung, Geschwindigkeit und Trajektorienwahl gelegt
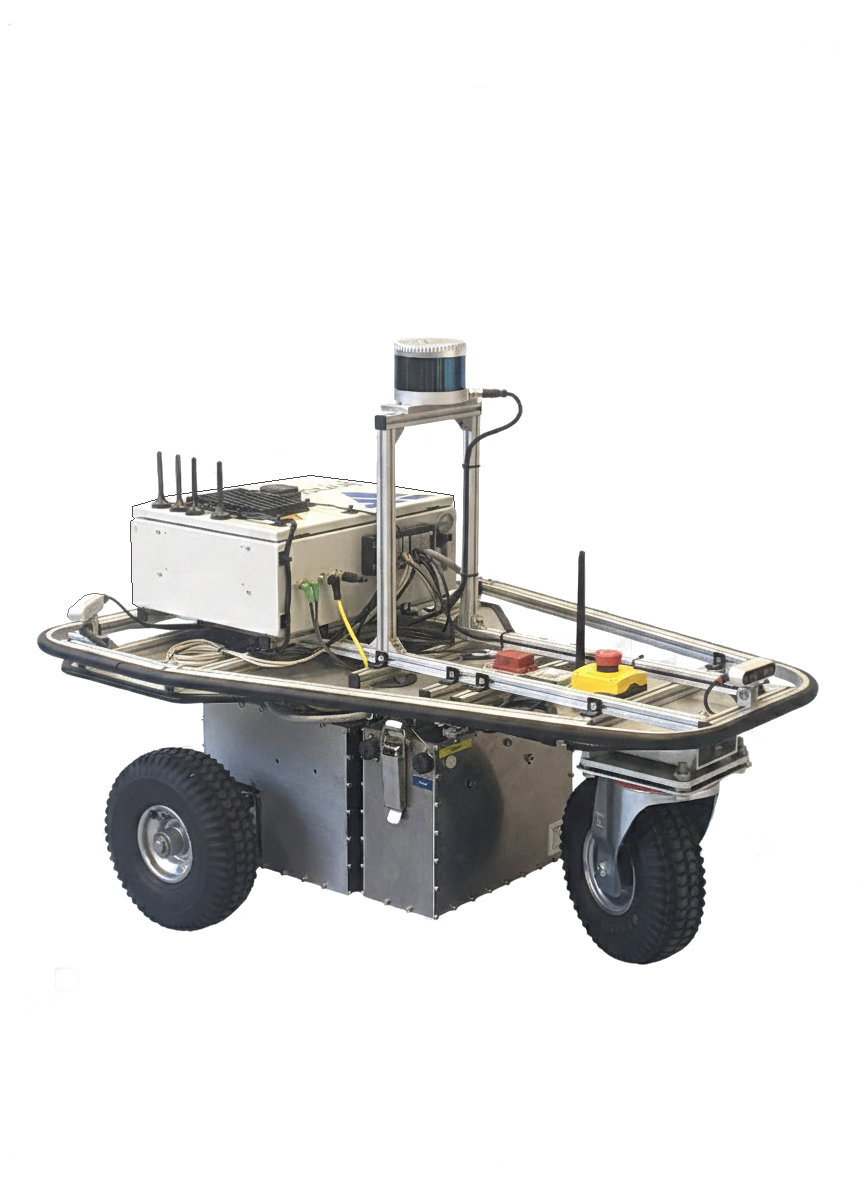
Innok Heros 223
Der Innok Heros 223 ist der größte mobile Roboter des Lehrstuhls für Ergonomie. Mit einer Länge von ca. 1 m, einer Breite von rund 70 cm und einem Gewicht von etwa 80 kg eignet sich das System insbesondere für Untersuchungen mit realitätsnahen Dimensionen und Dynamiken. Der Roboter wird über ROS Noetic programmiert und verfügt über eine umfangreiche Sensorik bestehend aus LIDAR, einer Stoßleiste sowie drei Intel RealSense RGB-D Kameras. Somit kann er mittels SLAM autonom navigieren.
Der Innok Heros 223 ist modular aufgebaut und kann für unterschiedliche Versuchsszenarien mit verschiedenen Anbauten ausgestattet werden. Dazu zählen unter anderem Kurzdistanzprojektoren für Projektionen im Fahrweg vor dem Roboter sowie austauschbare Cover, mit denen größere Außendimensionen und somit eine erhöhte Masse simuliert werden kann. Der Roboter nutzt einen Differenzialantrieb und erreicht Geschwindigkeiten von bis zu 2 m/s, was in etwa der doppelten typischen Gehgeschwindigkeit entspricht.
Bisher wird der Innok Heros 223 vor allem in Forschungsarbeiten zu koexistenten Begegnungen zwischen Menschen und Robotern in industriellen sowie öffentlichen Umgebungen eingesetzt, insbesondere zur Untersuchung von Sicherheit, Effizienz und Zufriedenheit, Akzeptanz und Vertrauen bei (hoch-)dynamischer mobiler Robotik.
Kollaborativer Industrieroboter: Franka Emika Panda
Der kollaborative Knickarmroboter Franka Emika Panda wird für Studien zur Mensch-Roboter-Kooperation und -Kollaboration sowie zur Telemanipulation eingesetzt. Der Roboter verfügt über sieben Freiheitsgrade, eine Reichweite von ca. 855 mm und eine Nutzlast von bis zu 3 kg, wodurch er eine hohe Flexibilität und Beweglichkeit in gemeinsamen Arbeitsräumen mit Menschen ermöglicht. Dank seiner integrierten Kraft- und Drehmomentsensorik in allen Gelenken erlaubt der Panda eine feinfühlige, sichere Interaktion und präzise Manipulation. Die kompakte Bauweise und die hohe Regelgüte unterstützen sowohl autonome als auch benutzergesteuerte (teleoperierte) Szenarien. Dadurch eignet sich der Franka Emika Panda besonders für experimentelle Untersuchungen zu koordinierten Manipulationsaufgaben,

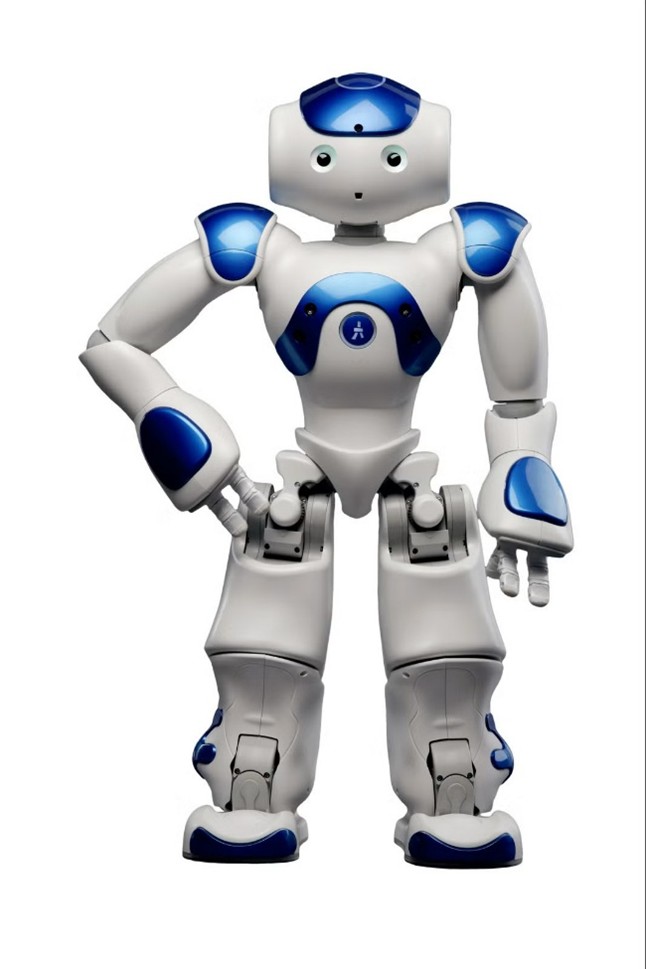
Sozialer Roboter: Softbank NAO
Der humanoide Roboter NAO von SoftBank Robotics wird zur Untersuchung der Mensch-Roboter-Interaktion mit besonderem Fokus auf soziale Interaktionsaspekte eingesetzt. NAO ist ca. 58 cm groß, wiegt rund 5,4 kg und verfügt über 25 Freiheitsgrade, die eine ausdrucksstarke und menschenähnliche Bewegung ermöglichen. Der Roboter ist mit mehreren taktilen Sensoren, Lautsprechern, Mikrofonen sowie zwei HD-Kameras ausgestattet und unterstützt Sprachwahrnehmung, -ausgabe und Gestenerkennung. Die integrierte Recheneinheit erlaubt autonome Interaktion sowie die Einbindung in experimentelle Kontrollarchitekturen (z. B. Wizard-of-Oz-Ansätze). Durch seine kindliche Erscheinung und klar interpretierbaren Verhaltensweisen eignet sich NAO besonders für Studien zu sozialer Wahrnehmung, Kommunikation und Akzeptanz in der Mensch-Roboter-Interaktion.
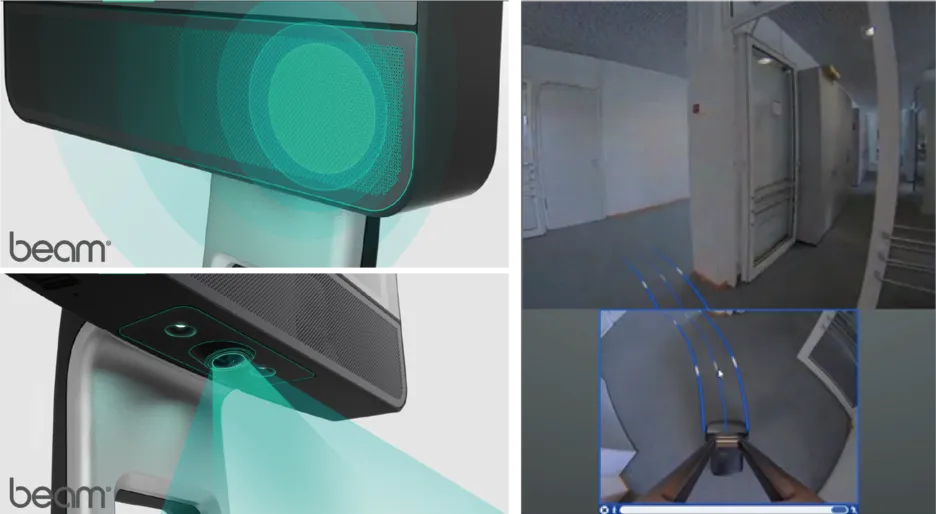
Telepräsenzsystem: Suitable Technologies Beam
Das Telepräsenzsystem Beam (enhanced) von Suitable Technologies wird zur Untersuchung sozialer Interaktionen in Wizard-of-Oz Experimenten eingesetzt (134,4 cm x 21,7 cm x 41,7 cm, 17,7 kg). Das System verfügt über eine Laufzeit von 7h, verwendet zwei integrierte WiFi Antennen zur Kommunikation (Dual-band 802.11 a/b/g/n, LTE verfügbar über USB) und erreicht Höchstgeschwindigkeiten von ca. 1 m/s. Der kinematische Aufbau mit zwei angetriebenen Rädern in der Front und zwei nachlaufenden Casterwheels gleicht dem des Parallax Stingray. Klare Soundwiedergabe auf beiden Seiten der Verbindung durch drei vorwärts- und ein rückwärtsgerichtetes Mikrophon (inkl. Echo- und Rauschunterdrückung). Die speziell angefertigten integrierten Lautsprecher ermöglichen klare und natürlich wirkende Soundwiedergabe. Zwei angebrachte HDR Kameras ermöglichen einen weitläufigen vorwärts gerichteten sowie nach unten gerichteten Blickwinkel, um das Fahren mit dem Beam sicher und einfach zu gestalten.
Industrieroboter: Reis RV20-16
Zusammen mit dem Lehrstuhl für Automatisierung und Informationssysteme der Technische Universität München besitzt und betreibt der Lehrstuhl für Ergonomie einen Reis RV20-16 Industrieroboter (6-Achsen-Knickarm-Roboter). Das System verfügt über eine Maximallast von 16 kg (Zusatzlast Achse 3 10 kg, Achse 2 20 kg, Achse 2+3 20 kg, Achse 1 30 kg), erreicht unter einer mittleren Leistungsaufnahme 1,6 kVA hohe Geschwindigkeiten (Achse 1 200 °/s, Achse 2 165 °/s, Achse 3 150 °/s, Achse 4 450 °/s, Achse 5 450 °/s, Achse 6 500 °/s) mit hoher Wiederholgenaugikeit ± 0,05 mm. Gewicht des Grundgerät (ohne Steuerung und Standplatte) beträgt 220 kg.

Untersuchungsfelder
- Proximity und Well-being
- Legibility und Predictability
- Usability und Programmierung