Munich School of Robotics and Machine Intelligence (from 01. October 2021 new: MIRMI - Munich Institute of Robotics and Machine Intelligence) - WORK
WORK - The Future of Work
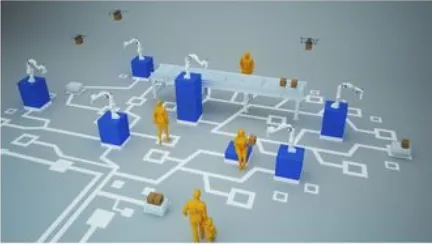
Human-Machine-collectives are an essential element of the production of the future: 100 employees use 1000 robots to solve a million new tasks a day.
The Munich School of Robotics and Machine Intelligence (MSRM, from 01. October 2021 new: MIRMI - Munich Institute of Robotics and Machine Intelligence) at the Technical University of Munich is an integrative research hub in the area of machine intelligence. THe goal of this hub is to explore the basis of robotics, perception and articial intelligence to develop innovative and sustainable solutions for the main challenges of today.
How to define Work
The most common form of work in linguistic usage is work as an employee. Furthermore, work exists in terms of value adding on the product (management view) and service as work. Due to constantly growing commonalities and interfaces of work with mobility and care for e.g. truck-driver, nursing personnel, domestic work, the need of society and economics for feasable and suitable solutions increases. The focus of Work@MSRM is on the following research questions an topics:
- System architechture and modular design including lifecycle phase design
- Human-centred design and handling of cooperative systems and teams
- Adaptivity, self-X of Robots@Work
- design approach development, evolution and maintenance of joint data collection and storage
- Examples of application
Future Joint Lab and infrastructural Ressources
One common joint lab strategy links different labs in a conceptual and virtual way (see also MyYoghurt demonstrator). This context includes amongst other production (consisting of manufacturing and assembly) as well as logistics. Technologies to factor in are sensor technologies, actuar engineering, software architecture, human machine interaction and many more. User of the future jont lab can be scientists, visitors and students. In addition to a strong collaboration of the different faculites ot the TUM, an international network with EuroTech and other strategic partners is intented. With the RAMP-UP Seed project a European collaboration with the French IMT has already started.
Currently the following demonstrators are available at the faculty:
- MyYoghurt (platform Industrie 4.0 Demonstrator)
- RIAN (intelligent robot network),
- ECMR (Experience Center Mobile Robotics)
- Drive Systems in Robots (Exhibition on Robotics)
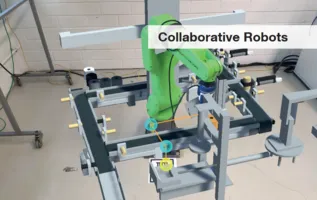
- Human robot collaboration: collaborative robot syfety in production, HRC including Franka components, AR based test environment for collaborative robots
- Robot Coordination: Automated Guided Vehicle System (AGVS) in logistics
- Software/Hardware testbed and demonstrators for distributed, networked systems, for example in trains
- Roboy Actuators and Sensors, Hand-Arm Systems
- Construction interieur and exterieur
Projects & Links
SFB 768 (G. Reinhart, B. Vogel-Heuser, M. Zimmermann)
iSiKon (B. Vogel-Heuser, J. Fottner)
MeVoDip ((B.Vogel-Heuser, G.Klinker)
RAMP-UP Seed (B.Vogel-Heuser, J. Fottner, K. Bengler)
Joint Publications [Work in Progress]
- B. Vogel-Heuser, M. Zimmermann, K. Stahl, K. Land, F. Ocker, S. Rötzer, S. Landler and M. Otto. "Current Challenges in the Design of Drives for Robot-Like Systems ," in IEEE International Conference on Systems, Man, and Cybernetics, IEEE, Oct. 2020. (accepted)
- S. Rötzer, N. Rostan, H. Steger, B. Vogel-Heuser and M. Zimmermann. "Sequencing of Information in Modular Model-based Systems Design," in DSM Conference, Oct. 2020 (angenommen)..
- S. Feldmann, F. Hauer, D. Pantförder, F. Pankratz, G. Klinker and B. Vogel-Heuser. "Management of Inconsistencies in Domain-Spanning Models - An Interactive Visualization Approach," in 19th International Conference on Human-Computer Interaction, pp. 71-87, 2017.
- J. Reif, G. Koltun, T. Drewlani, M. Zaggl, N. Kattner, C. Dengler, M. Basirati, H. Bauer, H. Krcmar, K. Kugler, B. Lohmann, U. Meyer, G. Reinhart and B. Vogel-Heuser. "Modeling as the Basis for Innovation Cycle Management of PSS: Making Use of Interdisciplinary Models," in IEEE International Symposium on Systems Engineering pp. 371-376, 2017.
- D. Bortot, K. Bengler, D. Stengel and B. Vogel-Heuser. "Ergonomische Grunduntersuchungen zur Realisierung effizienter Mensch-Roboter-Kooperationen," in VDI-Kongress: Elektronik im Kraftfahrzeug (VDI), pp. 75-86, 201
- S.Haddadin, De Luca A, A. Albu-Schäffer: "Robot Collisions: A Survey on Detection, Isolation, and Identification". IEEE Transactions on Robotics. 2017; 33(6): 1292-1312
- S.Haddadin, Khoury A, Rokahr T, Parusel S, Burgkart R, Bicchi A, A. Albu-Schäffer: "On making robots understand safety: Embedding injury knowledge into control". The International Journal of Robotics Research. 2012; 31(13): 1578–1602
- S.Haddadin, A. Albu-Schäffer, Hirzinger G: "G. Requirements for safe robots: Measurements, analysis and new insights". The International Journal of Robotics Research. 2009; 28(11-12): 1507-1527