Human Robot Interaction (HRI)
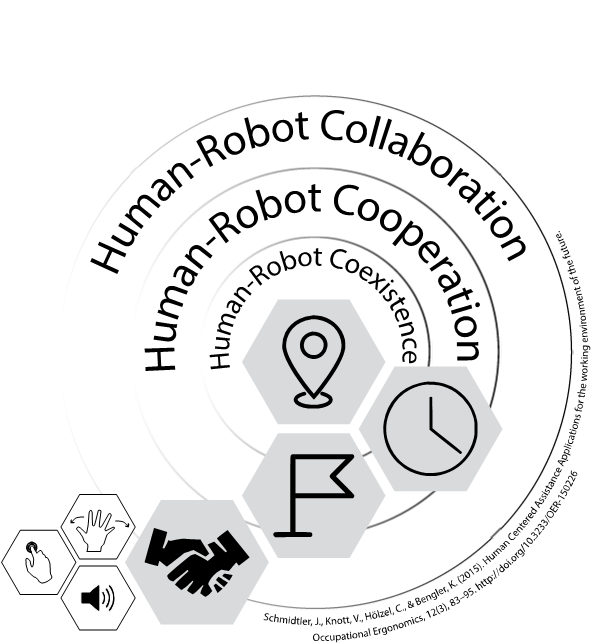
The fundamental idea behind Human-Robot Interaction (HRI) is to eliminate human weaknesses by compensating them with a robots strengths (Bortot, 2014). The scope of the Human-Robot Interaction Group (HRI Group) is defined by a taxonomy for HRI provided by Schmidtler, Knott, Hölzel, & Bengler (2015). They define HRI as an umbrella term with three intertwining subcategories. Based on a common workspace and timeframe (Human-Robot Coexistence) between human and robot, the terminology is nowadays extended by the additional components common goal (Human-Robot Cooperation) and direct joint action (Human-Robot Collaboration) via gesture, speech or haptic interaction.
Topics including, but not limited to, implicit motion behavior and communication (Bortot et al., 2010; Bortot, Born, & Bengler, 2013; Bortot, Ding, Antonopolous, & Bengler, 2012; Reinhardt, Pereira, Beckert, & Bengler, 2017; Reinhardt, Schmidtler, Körber, & Bengler, 2016), physical human augmentation (Schmidtler & Bengler, 2016; Schmidtler, Bengler, Dimeas, & Campeau-Lecours, 2017; Schmidtler, Harbauer, & Bengler, 2014; Schmidtler, Korber, & Bengler, 2016), and intuitive programming paradigms (Herbst, 2015; Herbst, Rühl, Hermann, Xue, & Bengler, 2013) are currently investigated from an Human Factors perspective. Attitudes and states like trust, acceptance, well-being, and comfort are manipulated and analyzed in terms of legibility, predictability, and usability in hypothesis-driven empirical quantitative and qualitative user studies.
Publications
Bortot, D. (2014). Ergonomic Human-Robot Coexistence in the Branch of Production. Technical Universtity Munich.
Bortot, D., Born, M., & Bengler, K. (2013). Directly or on detours? How should industrial robots approximate humans? In ACM/IEEE International Conference on Human-Robot Interaction
(Vol. 55, pp. 89–90). doi.org/10.1109/HRI.2013.6483515
Bortot, D., Ding, H., Antonopolous, A., & Bengler, K. (2012). Human motion behavior while interacting with an industrial robot. Work, 41
(SUPPL.1), 1699–1707. doi.org/10.3233/WOR-2012-0372-1699
Bortot, D., Ding, H., Giinzkofer, F., Stengel, D., Bengler, K., Schiller, F., & Stursherg, O. (2010). Motion analysis and motion modeling to increase efficiency of robothuman cooperation. Zeitschrift für Arbeitswissenschaft, 64
(2), 65–75. Retrieved from ezproxy.net.ucf.edu/login=http://search.ebscohost.com/login.aspx?direct=true&db=ega&AN=ega471184&site=ehost-live
Herbst, U. (2015). Gestaltung eines ergonomischen Interaktionskonzeptes für flexibel einsetzbare und transportable Roboterzellen
. Technical University of Munich. Retrieved from nbn-resolving.de/urn/resolver.pl
Herbst, U., Rühl, S., Hermann, A., Xue, Z., & Bengler, K. (2013). Ergonomic 6D interaction technologies for a flexible and transportable robot system: A comparison. IFAC Proceedings Volumes (IFAC-PapersOnline), 12
(PART 1), 58–63. doi.org/10.3182/20130811-5-US-2037.00024
Reinhardt, J., Pereira, A., Beckert, D., & Bengler, K. (2017). Dominance and Movement Cues of Robot Motion: A User Study on Trust and Predictability. In (accepted) IEEE International Conference on Systems, Man, and Cybernetics 2017.
Reinhardt, J., Schmidtler, J., Körber, M., & Bengler, K. (2016). Follow Me! Wie Roboter Menschen führen sollen. Zeitschrift Für Arbeitswissenschaft
. doi.org/10.1007/s41449-016-0039-2
Schmidtler, J., & Bengler, K. (2016). Size-weight illusion in human-robot collaboration. In 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN)
(pp. 874–879). IEEE. doi.org/10.1109/ROMAN.2016.7745222
Schmidtler, J., Bengler, K., Dimeas, F., & Campeau-Lecours, A. (2017). A Questionnaire for the Evaluation of Physical Assistive Devices (QUEAD) - Testing Usability and Acceptance in Human-Robot Interaction. In accepted at 2017 IEEE International Conference on Systems, Man, and Cybernetivs.
Schmidtler, J., Harbauer, C., & Bengler, K. (2014). Investigation of Human Behaviour in Pushing and Pulling Tasks for Direct Manipulation of a Collaborative Robot. In Proceedings of the Human Factors and Ergonomics Society Europe Chapter
. doi.org/10.13140/RG.2.1.4230.1601
Schmidtler, J., Knott, V., Hölzel, C., & Bengler, K. (2015). Human Centered Assistance Applications for the working environment of the future. Occupational Ergonomics, 12
(3), 83–95. doi.org/10.3233/OER-150226
Schmidtler, J., Korber, M., & Bengler, K. (2016). A trouble shared is a trouble halved — Usability measures for Human-Robot Collaboration. In 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC)
(pp. 000217–000222). IEEE. doi.org/10.1109/SMC.2016.7844244