Automated Realtime Imaging for Laparoscopic Interventions
Project title
DFG LU604/27-2 Automated Realtime Imaging for Laparoscopic Interventions

Goal
Improvement of single incision laparoscopic surgery both in the field of tissue manipulation as well as in the field of intraoperative imaging and visualization of information
Contact
Dipl.-Ing. Sandra Brecht (wiss. Mitarbeiter)
Application
Laparoscopic procedures, especially the resection of deep-seated tumors, for example laparoscopic partial nephrectomy
Research topic
Manipulator system for single incision laparoscopic surgery integrating augmented reality features
State of the art
Manipulation with laparoscopic instruments
Laparoscope (and laparoscopic ultrasound probe) for visualization
Drawbacks of the State of the Art
Restricted instrument handling due to the limited access using only one skin incision
Only superficial imaging with the laparoscope
Images from the laparoscope and the ultrasound system are displayed on separate screens and have to be matched to the anatomical context in mind, which is challenging and error-prone
Concept
Selective laser sintered Single Incision Laparoscopic Manipulator for bimanual manipulation and guidance of an ultrasound probe integrating augmented reality features by superimposing additional information gained with the ultrasound probe onto the laparoscopic image
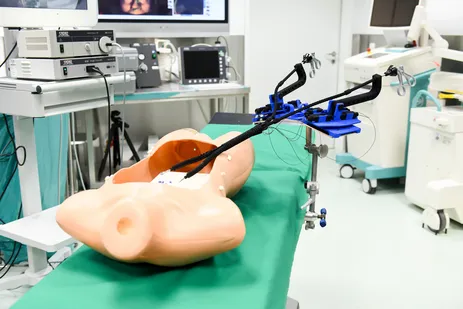
Current Results
Prototype of the Single Incision Laparoscopic Ultrasound Manipulator System