PLAFOKON
Project title
DFG LU 604/31-2 "PLAFOKON - Universelles, skalierbares Plattformkonzept für mikroinvasive viszeralmedizinische Eingriffe"

Goal
Automated design process for manipulator systems for minimally invasive surgery
Contact
M.Sc. Yannick Krieger (wiss. Mitarbeiter)
Lucas Artmann (wiss. Mitarbeiter)
Application
Assistive manipulators for minimally invasive surgery
Patient-individual medical robots
Research topic
Automated design and generative manufacturing of medical devices
State of the art
Conventional minimally invasive surgery
Selective Laser Sintering
Drawbacks of the State of the Art
Difficult surgical procedures caused by restricted dexterity of the instrument motions
Concept
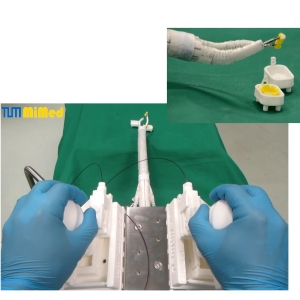
Automated design of individualized disposable manipulators for minimally invasive surgery manufactured using selective laser sintering
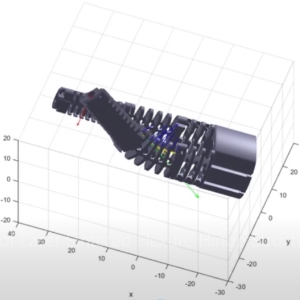
MATLAB software for the automated design process of individualized manipulator structures
Current Results
Significant benefits compared to the conventional surgical technique proven in a randomized study in a porcine model
MATLAB software for the design of monolithic manipulators structures as disposable manipulators for minimally invasive surgery
Design concept for monolithic soft robotic structures with predefined end poses ("Shape-Memory" Structures)
Evaluation of Single-Port Overtube manipulators (SPOT) in various endoscopic ex-vivo szenarios