Endoscopic minimanipulator
Project title
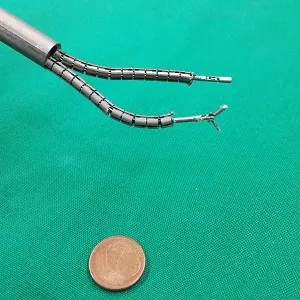
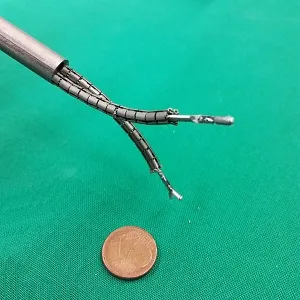
Development of a double-arm endoscopic minimanipulator for minimally invasive surgery
Goal
Design, fabrication and validation of the double-arm endoscopic minimanipulator system
Contact
M.Sc. Suat Cömert (wiss. Mitarbeiter)
Application
Treatment of non-muscle invasive urinary bladder tumors
Treatment of frontal sinus mucoceles
Research topic
Methods for flexure hinge based production of snake-like manipulators from nitinol using wire electrical discharge machining
State of the art
Transurethral resection of bladder tumors using rigid instruments (resectoscope)
Draf-III drainage using rigid instruments
Drawbacks of the State of the Art
Reachability limitations due to the lack of maneouvrability
Insufficient handling of the pathological structures
Concept
Increased dexterity and reachability provided by the double-arm manipulation and triangulation
Current Results
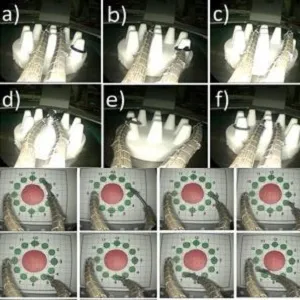
Achievement of the basic representative surgical tasks such as pick-and-place and circular path marking