Robotics and Mechanisms
Research group





Our Motivation
The research group Medical Robotics & Mechanisms at the Chair of Micro Technology and Medical Device Technology (MiMed) examines the efficiency of medical mechatronic systems and kinematic solutions in general. In various projects, we develop devices and systems to assist surgeons or to directly benefiting the patients. For this purpose, we are working in the field of mechanics, kinematics, electronics and information technology. Particularly, the potentialities of rapid manufacturing (e.g. selective laser sintering) are systematically explored.
The systems and devices are developed and certified according to the current standards of medical devices, because our objective is the proof of our concepts with clinical trials and evaluation. We take care, that our devices show a benefit for the physician and the patient in the real clinical environment.
Methodology


Understanding clinical problems and the physicians’ perspective on medical needs is essential for the success of developing medical devices. The cooperation with clinical partners starts long before the beginning of the development and continues during the whole project. Thereby it is ensured, that the development of novel devices solves existing medical problems. The aim of every project is the clinical trial and evaluation of prototypes.
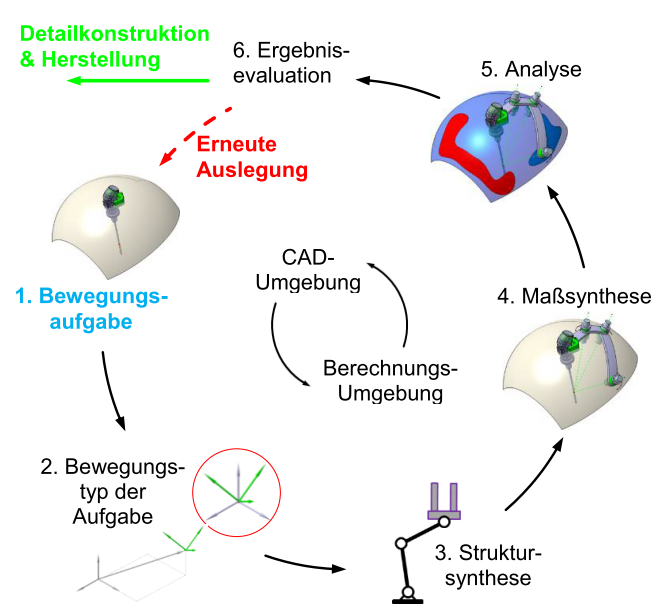
The basic idea of kinematic design is the development of optimal solutions with various degrees of freedom for arbitrary movement tasks. Computer-aided methods allow the design of mechanisms for versatile applications (e.g. automotive, assitive devices) and robot design.
Projects



- BFS-Project: Zeit- und kosteneffiziente Entwurfsprozesse für Gelenkstrukturen durch Integration von softwaregestütztem Kinematik-Design und Rapid Prototyping (BFS AZ-1181-15)
In cooperation with: Webasto Convertibles GmbH, BMW AG
- DFG-Project: Mikromanipulatoren in der HNO-Chirurgie (DFG LU604/75-2)
In cooperation with: ACQUA Klinik Leipzig
- DFG-Project: PLAFOKON - Universelles, skalierbares Plattformkonzept für mikroinvasive viszeralmedizinische Eingriffe (DFG LU 604/31-2)
In cooperation with: InExEn Universitätsklinikum Ulm, Klinikum rechts der Isar, CAMP Research Group at the Chair for Computer Aided Medical Procedures & Augmented Reality
- DFG-Projekt FoldRob - Formalisierte Auslegungsmethoden und komponentenbezogene Grundlagen zur Entwicklung faltungsbasierter Roboter
In cooperation with: IGMR der RTWH Aachen
Facilities
The chair posseses various manufactoring facilities for the production of functional models and prototypes. Such as a precision engineering shop floor. Notable facilities include:
- EOS Formiga 100
- CNC 5-axis milling machine (Deckel)
- Z-corp Z-510
- Trotec Speedy 400 flexx laser cutter




Selected Publications
- Krieger, Y.S.; Kuball, C.-M.; Rumschoettel, D.; Dietz, C.; Pfeiffer, J.H.; Roppenecker, D.B. and Lueth, T.C. (2017): Fatigue Strength of Laser Sintered Flexure Hinge Structures for Soft Robotic Applications. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017), Vancouver, Canada, September 24–28, 2017.
- Laudahn, S.; Irlinger, F.; Abdul-Sater, K. (2017): A flexible discrete building block synthesis approach as basis for the design of planar linkages. ASME IDETC 2017, Cleveland, Ohio, 06.08.-09.08.2017.
- Krieger, Y.S.; Roppenecker, D.B.; Kuru,I.; Lüth, T.C. (2015): Multi-Arm Snake-Like Robot. IEEE International Conference on Robotics and Automation (ICRA), Singapore, May 20-June 03, 2017.
- Abdul-Sater, K.; Irlinger, F.; Lueth, T.C. (2015): Three-Position Synthesis of Origami-Evolved, Spherically Constrained Spatial RR Chains, ASME Journal of Mechanisms and Robotics, p. 12.
- Goerlach, F.; Lueddemann, T.; Striffler, N.; Lueth, T.C. (2015): Multi-Layered, 3D Skin Phantoms of Human Skin in the Wavelength Range 650-850nm. 2015 International Conference on Intelligent Informatics and Biomedical Sciences, Okinawa Japan, 28.-30. November. pp. 250 - 256 DOI: 10.1109/ICIIBMS.2015.7439539
- Roppenecker, D.B.; Schuster, L; Coy, J.A.; Traeger, M.F.; Entsfellner, K.; Lueth, T.C. (2014): Modular Body of the Multi Arm Snake-Like Robot. IEEE International Conference on Robotics and Biomimetics (ROBIO), Bali, Indonesia, pp. 1–6. (Best Paper Award at ROBIO 2014)
- Entsfellner, K.; Kuru, I.; Maier, T.; Gumprecht, J.D.J.; Lueth, T.C. (2014): First 3D printed medical robot for ENT surgery - Application specific manufacturing of laser sintered disposable manipulators. Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference, pp. 4278 - 4283 10.1109/IROS.2014.6943166
- Maier, T.; Strauss, G.; Hofer, M.; Kraus, T.; Runge, A.; Stenzel, R.; Gumprecht, J.; Berger, T.; Dietz, A.; Lueth, T.C. (2010): A new Micromanipulator System for middle ear surgery. IEEE International Conference on Robotics and Automation (ICRA 2010), pp.1568-1573, 3-7 May 2010 doi: 10.1109/ROBOT.2010.5509594 PMID: 21097107
Contact Persons
Dingzhi Zhang, M. Sc.
Felix Pancheri, M.Sc.